 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUAV Navigation in Tunnels with 2D tilted LiDARs
Apr 15, 2024Navigation of UAVs in challenging environments like tunnels or mines, where it is not possible to use GNSS methods to self-localize, illumination may be uneven or nonexistent, and wall features are likely to be scarce, is a complex task, especially if the navigation has to be done at high speed. In this paper we propose a novel proof-of-concept navigation technique for UAVs based on the use of LiDAR information through the joint use of geometric and machine-learning algorithms. The perceived information is processed by a deep neural network to establish the yaw of the UAV with respect to the tunnel's longitudinal axis, in order to adjust the direction of navigation. Additionally, a geometric method is used to compute the safest location inside the tunnel (i.e. the one that maximizes the distance to the closest obstacle). This information proves to be sufficient for simple yet effective navigation in straight and curved tunnels.
Equitable Persistent Coverage of Non-Convex Environments with Graph-Based Planning
Jan 24, 2024In this paper we tackle the problem of persistently covering a complex non-convex environment with a team of robots. We consider scenarios where the coverage quality of the environment deteriorates with time, requiring to constantly revisit every point. As a first step, our solution finds a partition of the environment where the amount of work for each robot, weighted by the importance of each point, is equal. This is achieved using a power diagram and finding an equitable partition through a provably correct distributed control law on the power weights. Compared to other existing partitioning methods, our solution considers a continuous environment formulation with non-convex obstacles. In the second step, each robot computes a graph that gathers sweep-like paths and covers its entire partition. At each planning time, the coverage error at the graph vertices is assigned as weights of the corresponding edges. Then, our solution is capable of efficiently finding the optimal open coverage path through the graph with respect to the coverage error per distance traversed. Simulation and experimental results are presented to support our proposal.
* This is the accepted version an already published manuscript. See journal reference for details
Pound: A ROS node for Reducing Delay and Jitter in Wireless Multi-Robot Networks
Jul 26, 2017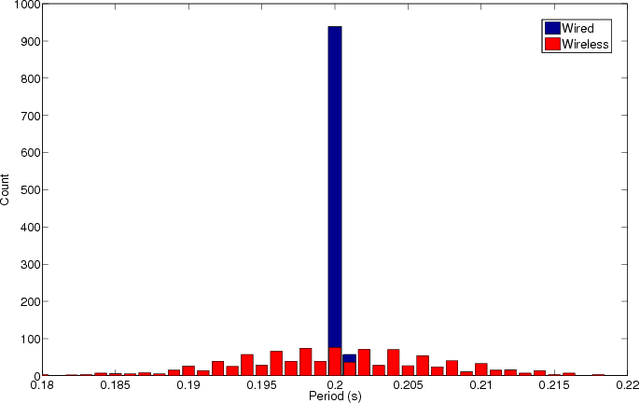
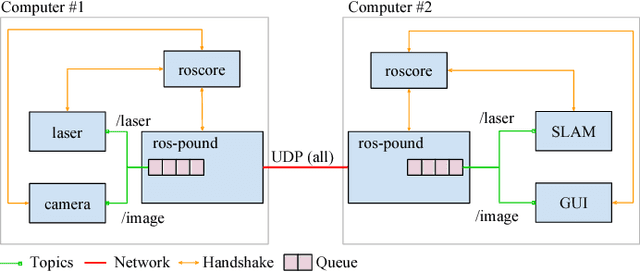
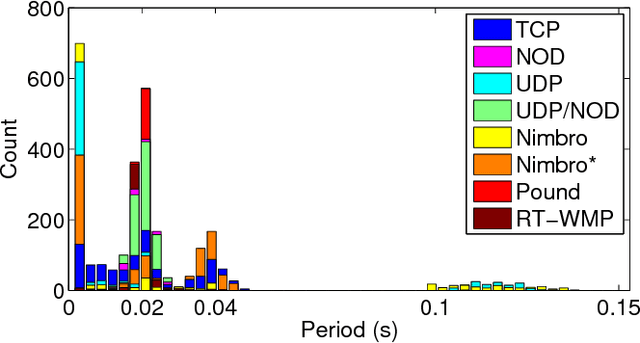
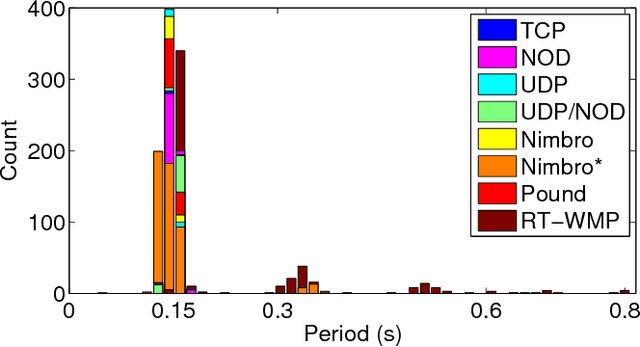
The Robot Operating System (ROS) is rapidly becoming the de facto framework for building robotics systems, thanks to its flexibility and the large acceptance that it has received in the robotics community. With the growth of its popularity, it has started to be used in multi-robot systems as well. However, the TCP connections that the platform relies on for connecting the so-called ROS nodes, presents several issues in terms of limited-bandwidth, delays and jitter, when used in wireless ad-hoc networks. In this paper, we present a thorough analysis of the problem and propose a new ROS node called Pound to improve the wireless communication performance. Pound allows the use of multiple ROS cores and introduces a priority scheme favoring more important flows over less important ones, thus reducing delay and jitter over single-hop and multihop networks. We compare Pound to the state-of-the-art solutions and show that it performs equally well, or better in all the test cases, including a control-over-network example.