 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePound: A ROS node for Reducing Delay and Jitter in Wireless Multi-Robot Networks
Paper and Code
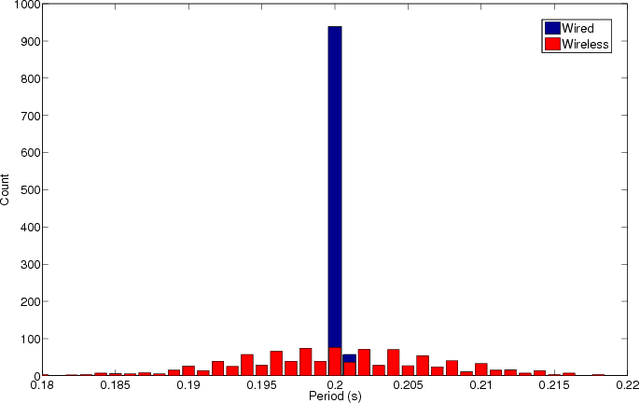
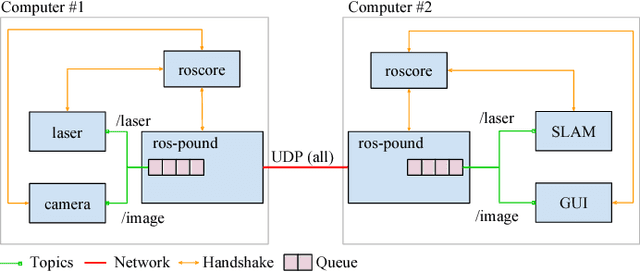
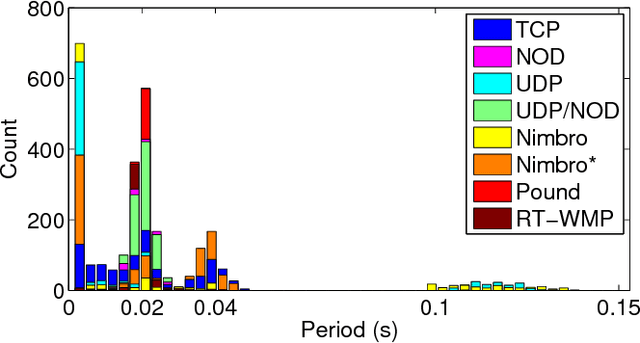
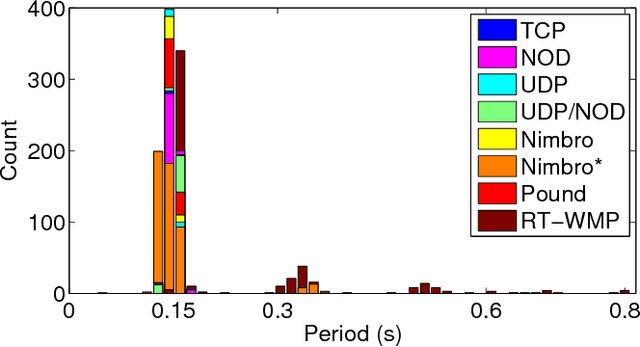
The Robot Operating System (ROS) is rapidly becoming the de facto framework for building robotics systems, thanks to its flexibility and the large acceptance that it has received in the robotics community. With the growth of its popularity, it has started to be used in multi-robot systems as well. However, the TCP connections that the platform relies on for connecting the so-called ROS nodes, presents several issues in terms of limited-bandwidth, delays and jitter, when used in wireless ad-hoc networks. In this paper, we present a thorough analysis of the problem and propose a new ROS node called Pound to improve the wireless communication performance. Pound allows the use of multiple ROS cores and introduces a priority scheme favoring more important flows over less important ones, thus reducing delay and jitter over single-hop and multihop networks. We compare Pound to the state-of-the-art solutions and show that it performs equally well, or better in all the test cases, including a control-over-network example.