 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEquitable Persistent Coverage of Non-Convex Environments with Graph-Based Planning
Jan 24, 2024In this paper we tackle the problem of persistently covering a complex non-convex environment with a team of robots. We consider scenarios where the coverage quality of the environment deteriorates with time, requiring to constantly revisit every point. As a first step, our solution finds a partition of the environment where the amount of work for each robot, weighted by the importance of each point, is equal. This is achieved using a power diagram and finding an equitable partition through a provably correct distributed control law on the power weights. Compared to other existing partitioning methods, our solution considers a continuous environment formulation with non-convex obstacles. In the second step, each robot computes a graph that gathers sweep-like paths and covers its entire partition. At each planning time, the coverage error at the graph vertices is assigned as weights of the corresponding edges. Then, our solution is capable of efficiently finding the optimal open coverage path through the graph with respect to the coverage error per distance traversed. Simulation and experimental results are presented to support our proposal.
* This is the accepted version an already published manuscript. See journal reference for details
Cooperative Periodic Coverage With Collision Avoidance
Jan 24, 2024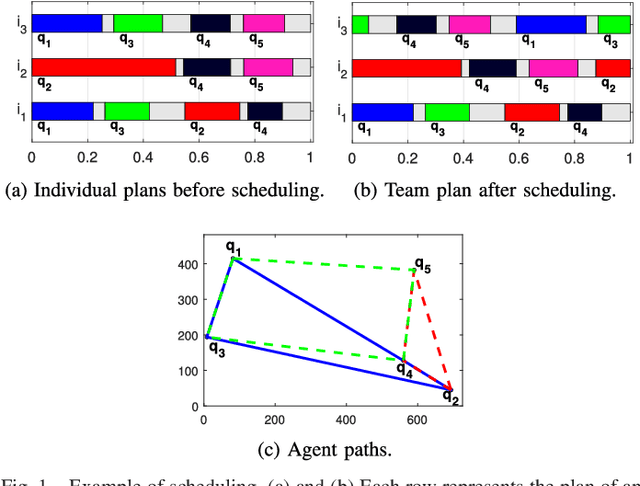



In this paper we propose a periodic solution to the problem of persistently covering a finite set of interest points with a group of autonomous mobile agents. These agents visit periodically the points and spend some time carrying out the coverage task, which we call coverage time. Since this periodic persistent coverage problem is NP-hard, we split it into three subproblems to counteract its complexity. In the first place, we plan individual closed paths for the agents to cover all the points. Second, we formulate a quadratically constrained linear program to find the optimal coverage times and actions that satisfy the coverage objective. Finally, we join together the individual plans of the agents in a periodic team plan by obtaining a schedule that guarantees collision avoidance. To this end, we solve a mixed integer linear program that minimizes the time in which two or more agents move at the same time. Eventually, we apply the proposed solution to an induction hob with mobile inductors for a domestic heating application and show its performance with experiments on a real prototype.
* This is the accepted version an already published manuscript. See journal reference for details