 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntermittent Connectivity Maintenance With Heterogeneous Robots
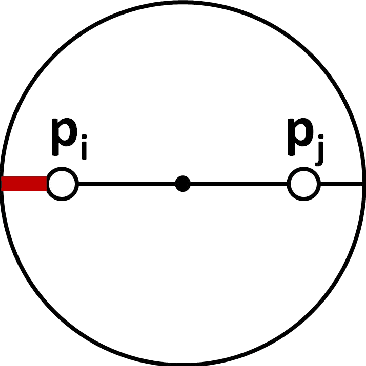
Jan 24, 2024We consider a scenario of cooperative task servicing, with a team of heterogeneous robots with different maximum speeds and communication radii, in charge of keeping the network intermittently connected. We abstract the task locations into a $1D$ cycle graph that is traversed by the communicating robots, and we discuss intermittent communication strategies so that each task location is periodically visited, with a worst--case revisiting time. Robots move forward and backward along the cycle graph, exchanging data with their previous and next neighbors when they meet, and updating their region boundaries. Asymptotically, each robot is in charge of a region of the cycle graph, depending on its capabilities. The method is distributed, and robots only exchange data when they meet.
Simultaneous Deployment and Tracking Multi-Robot Strategies with Connectivity Maintenance
Mar 19, 2018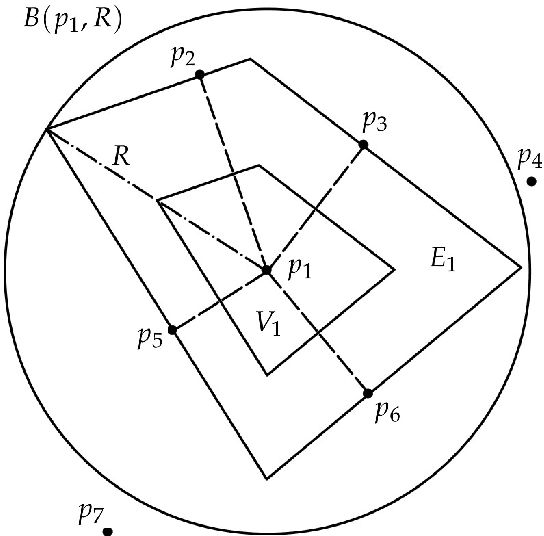
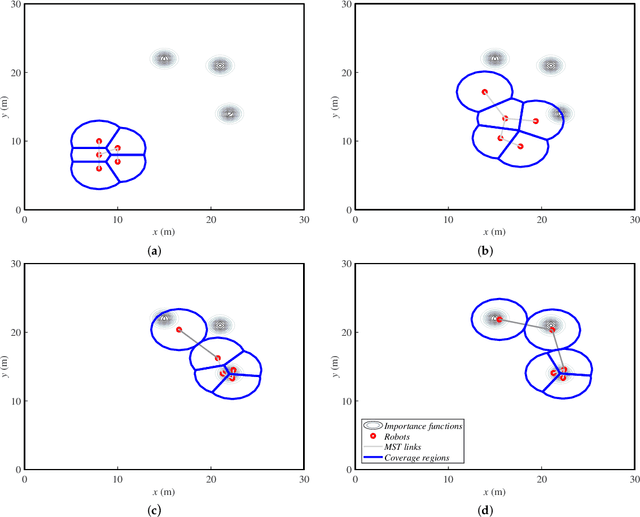
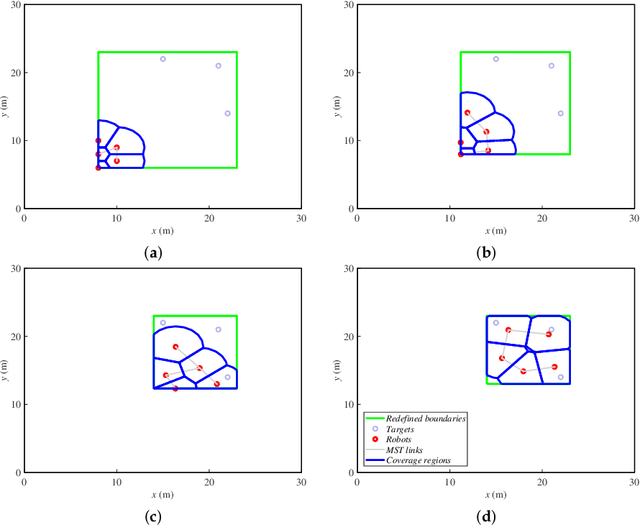
Multi robot teams composed by ground and aerial vehicles have gained attention during the last years. We present a scenario where both types of robots must monitor the same area from different view points. In this paper we propose two Lloyd-based tracking strategies to allow the ground robots (agents) follow the aerial ones (targets), keeping the connectivity between the agents. The first strategy establishes density functions on the environment so that the targets acquire more importance than other zones, while the second one iteratively modifies the virtual limits of the working area depending on the positions of the targets. We consider the connectivity maintenance due to the fact that coverage tasks tend to spread the agents as much as possible, which is addressed by restricting their motions so that they keep the links of a Minimum Spanning Tree of the communication graph. We provide a thorough parametric study of the performance of the proposed strategies under several simulated scenarios. In addition, the methods are implemented and tested using realistic robotic simulation environments and real experiments.
Distributed Multi-view Matching in Networks with Limited Communications
Apr 11, 2012We address the problem of distributed matching of features in networks with vision systems. Every camera in the network has limited communication capabilities and can only exchange local matches with its neighbors. We propose a distributed algorithm that takes these local matches and computes global correspondences by a proper propagation in the network. When the algorithm finishes, each camera knows the global correspondences between its features and the features of all the cameras in the network. The presence of spurious introduced by the local matcher may produce inconsistent global correspondences, which are association paths between features from the same camera. The contributions of this work are the propagation of the local matches and the detection and resolution of these inconsistencies by deleting local matches. Our resolution algorithm considers the quality of each local match, when this information is provided by the local matcher. We formally prove that after executing the algorithm, the network finishes with a global data association free of inconsistencies. We provide a fully decentralized solution to the problem which does not rely on any particular communication topology. Simulations and experimental results with real images show the performance of the method considering different features, matching functions and scenarios.