 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntermittent Connectivity Maintenance With Heterogeneous Robots
Jan 24, 2024We consider a scenario of cooperative task servicing, with a team of heterogeneous robots with different maximum speeds and communication radii, in charge of keeping the network intermittently connected. We abstract the task locations into a $1D$ cycle graph that is traversed by the communicating robots, and we discuss intermittent communication strategies so that each task location is periodically visited, with a worst--case revisiting time. Robots move forward and backward along the cycle graph, exchanging data with their previous and next neighbors when they meet, and updating their region boundaries. Asymptotically, each robot is in charge of a region of the cycle graph, depending on its capabilities. The method is distributed, and robots only exchange data when they meet.
Physics-Informed Multi-Agent Reinforcement Learning for Distributed Multi-Robot Problems
Dec 30, 2023



The networked nature of multi-robot systems presents challenges in the context of multi-agent reinforcement learning. Centralized control policies do not scale with increasing numbers of robots, whereas independent control policies do not exploit the information provided by other robots, exhibiting poor performance in cooperative-competitive tasks. In this work we propose a physics-informed reinforcement learning approach able to learn distributed multi-robot control policies that are both scalable and make use of all the available information to each robot. Our approach has three key characteristics. First, it imposes a port-Hamiltonian structure on the policy representation, respecting energy conservation properties of physical robot systems and the networked nature of robot team interactions. Second, it uses self-attention to ensure a sparse policy representation able to handle time-varying information at each robot from the interaction graph. Third, we present a soft actor-critic reinforcement learning algorithm parameterized by our self-attention port-Hamiltonian control policy, which accounts for the correlation among robots during training while overcoming the need of value function factorization. Extensive simulations in different multi-robot scenarios demonstrate the success of the proposed approach, surpassing previous multi-robot reinforcement learning solutions in scalability, while achieving similar or superior performance (with averaged cumulative reward up to x2 greater than the state-of-the-art with robot teams x6 larger than the number of robots at training time).
Learning to Identify Graphs from Node Trajectories in Multi-Robot Networks
Jul 10, 2023



The graph identification problem consists of discovering the interactions among nodes in a network given their state/feature trajectories. This problem is challenging because the behavior of a node is coupled to all the other nodes by the unknown interaction model. Besides, high-dimensional and nonlinear state trajectories make difficult to identify if two nodes are connected. Current solutions rely on prior knowledge of the graph topology and the dynamic behavior of the nodes, and hence, have poor generalization to other network configurations. To address these issues, we propose a novel learning-based approach that combines (i) a strongly convex program that efficiently uncovers graph topologies with global convergence guarantees and (ii) a self-attention encoder that learns to embed the original state trajectories into a feature space and predicts appropriate regularizers for the optimization program. In contrast to other works, our approach can identify the graph topology of unseen networks with new configurations in terms of number of nodes, connectivity or state trajectories. We demonstrate the effectiveness of our approach in identifying graphs in multi-robot formation and flocking tasks.
Event-based Visual Tracking in Dynamic Environments
Dec 15, 2022Visual object tracking under challenging conditions of motion and light can be hindered by the capabilities of conventional cameras, prone to producing images with motion blur. Event cameras are novel sensors suited to robustly perform vision tasks under these conditions. However, due to the nature of their output, applying them to object detection and tracking is non-trivial. In this work, we propose a framework to take advantage of both event cameras and off-the-shelf deep learning for object tracking. We show that reconstructing event data into intensity frames improves the tracking performance in conditions under which conventional cameras fail to provide acceptable results.
* This preprint has not undergone peer review or any post-submission improvements or corrections. The Version of Record of this contribution is published in ROBOT2022: Fifth Iberian Robotics Conference
Multi-robot Implicit Control of Massive Herds
Sep 20, 2022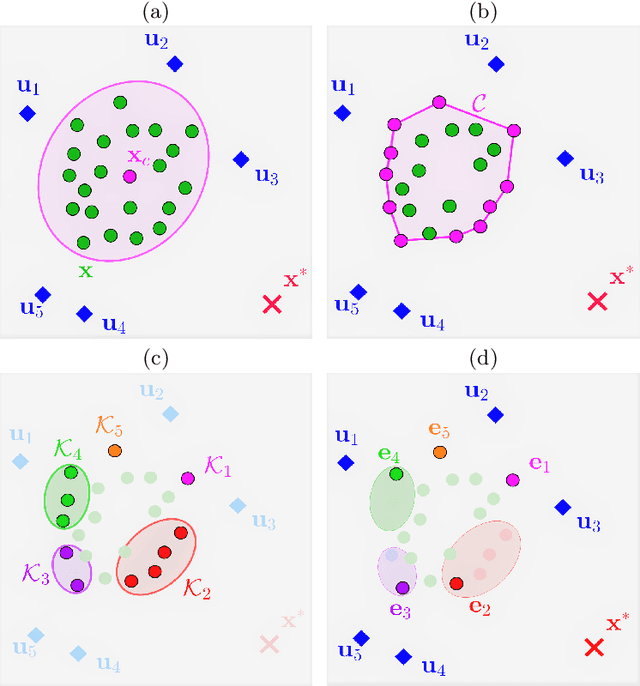
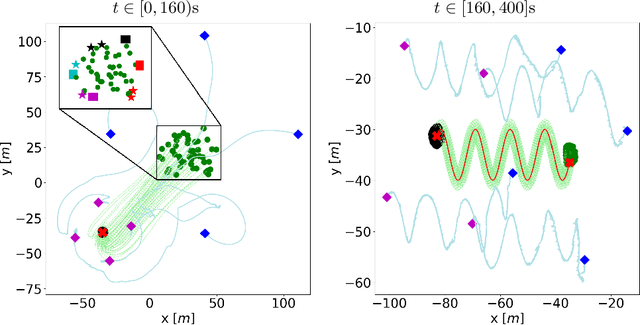
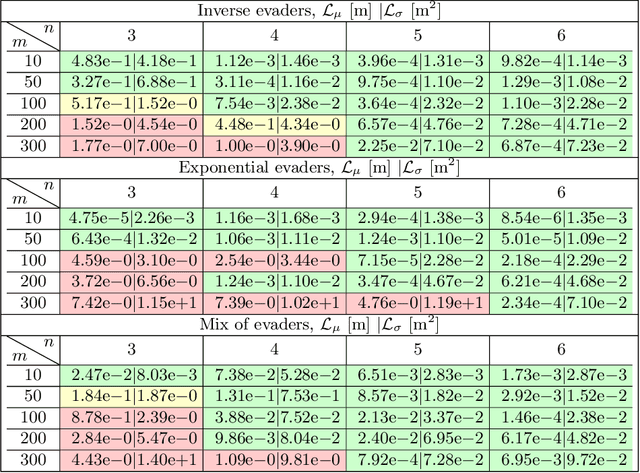
This paper solves the problem of herding countless evaders by means of a few robots. The objective is to steer all the evaders towards a desired tracking reference while avoiding escapes. The problem is very challenging due to the highly complex repulsive evaders' dynamics and the underdetermined states to control. We propose a solution that is based on Implicit Control and a novel dynamic assignment strategy to select the evaders to be directly controlled. The former is a general technique that explicitly computes control inputs even in highly complex input-nonaffine dynamics. The latter is built upon a convex-hull dynamic clustering inspired by the Voronoi tessellation problem. The combination of both allows to choose the best evaders to directly control, while the others are indirectly controlled by exploiting the repulsive interactions among them. Simulations show that massive herds can be herd throughout complex patterns by means of a few herders.
LEMURS: Learning Distributed Multi-Robot Interactions
Sep 20, 2022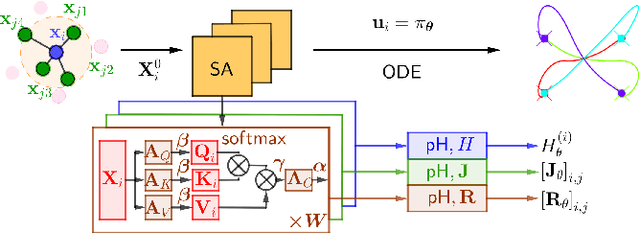
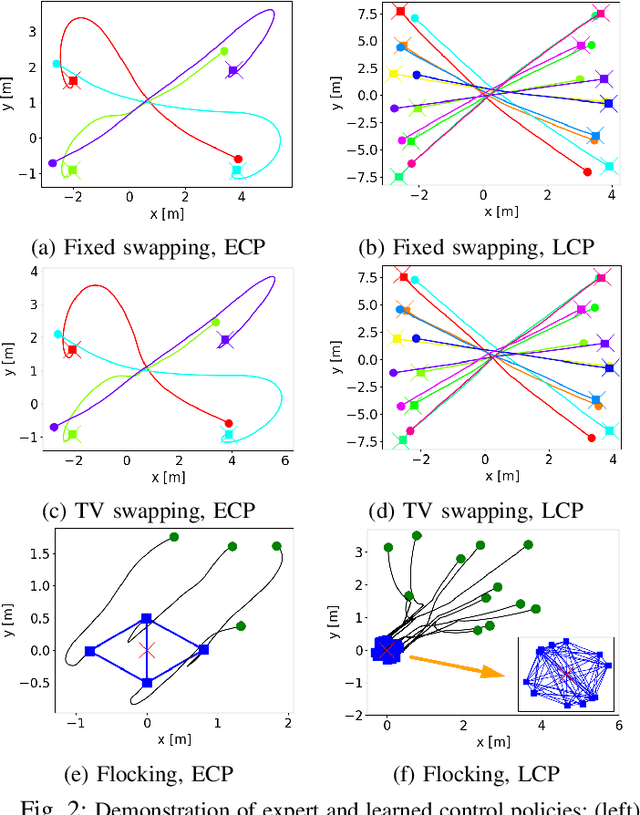
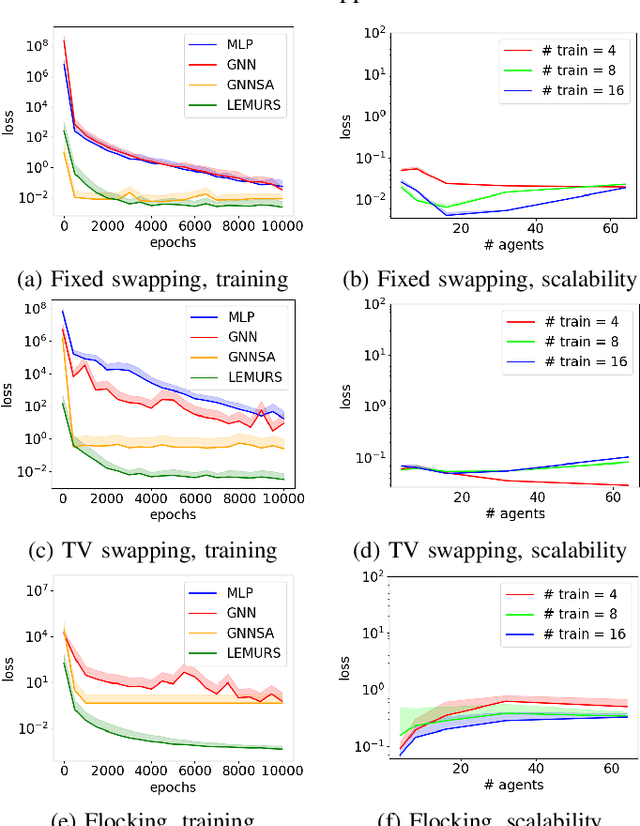
This paper presents LEMURS, an algorithm for learning scalable multi-robot control policies from cooperative task demonstrations. We propose a port-Hamiltonian description of the multi-robot system to exploit universal physical constraints in interconnected systems and achieve closed-loop stability. We represent a multi-robot control policy using an architecture that combines self-attention mechanisms and neural ordinary differential equations. The former handles time-varying communication in the robot team, while the latter respects the continuous-time robot dynamics. Our representation is distributed by construction, enabling the learned control policies to be deployed in robot teams of different sizes. We demonstrate that LEMURS can learn interactions and cooperative behaviors from demonstrations of multi-agent navigation and flocking tasks.
Distributed Multi-view Matching in Networks with Limited Communications
Apr 11, 2012We address the problem of distributed matching of features in networks with vision systems. Every camera in the network has limited communication capabilities and can only exchange local matches with its neighbors. We propose a distributed algorithm that takes these local matches and computes global correspondences by a proper propagation in the network. When the algorithm finishes, each camera knows the global correspondences between its features and the features of all the cameras in the network. The presence of spurious introduced by the local matcher may produce inconsistent global correspondences, which are association paths between features from the same camera. The contributions of this work are the propagation of the local matches and the detection and resolution of these inconsistencies by deleting local matches. Our resolution algorithm considers the quality of each local match, when this information is provided by the local matcher. We formally prove that after executing the algorithm, the network finishes with a global data association free of inconsistencies. We provide a fully decentralized solution to the problem which does not rely on any particular communication topology. Simulations and experimental results with real images show the performance of the method considering different features, matching functions and scenarios.