 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Navigation with Convergence Guarantees in Complex Dynamic Environments
Jun 21, 2023This article addresses the obstacle avoidance problem for setpoint stabilization and path-following tasks in complex dynamic 2-D environments that go beyond conventional scenes with isolated convex obstacles. A combined motion planner and controller is proposed for setpoint stabilization that integrates the favorable convergence characteristics of closed-form motion planning techniques with the intuitive representation of system constraints through Model Predictive Control (MPC). The method is analytically proven to accomplish collision avoidance and convergence under soft conditions, and it is extended to path-following control. Various simulation scenarios using a non-holonomic unicycle robot are provided to showcase the efficacy of the control scheme and its improved convergence results compared to standard path-following MPC approaches with obstacle avoidance.
Obstacle Avoidance in Dynamic Environments via Tunnel-following MPC with Adaptive Guiding Vector Fields
Mar 28, 2023This paper proposes a motion control scheme for robots operating in a dynamic environment with concave obstacles. A Model Predictive Controller (MPC) is constructed to drive the robot towards a goal position while ensuring collision avoidance without direct use of obstacle information in the optimization problem. This is achieved by guaranteeing tracking performance of an appropriately designed receding horizon path. The path is computed using a guiding vector field defined in a subspace of the free workspace where each point in the subspace satisfies a criteria for minimum distance to all obstacles. The effectiveness of the control scheme is illustrated by means of simulation.
Creating Star Worlds -- Modelling Concave Obstacles for Reactive Motion Planning
May 19, 2022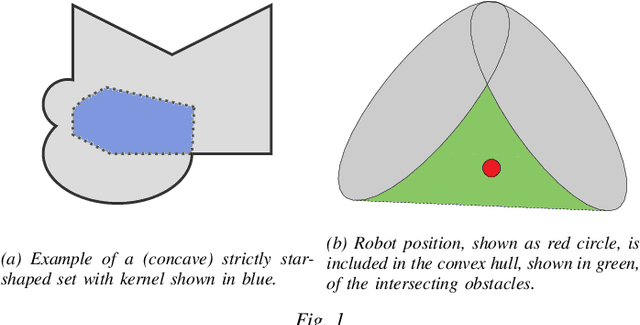


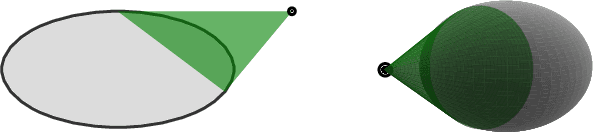
Motion planning methods like navigation functions and harmonic potential fields provide (almost) global convergence and are suitable for obstacle avoidance in dynamically changing environments due to their reactive nature. A common assumption in the control design is that the robot operates in a disjoint star world, i.e. all obstacles are strictly starshaped and mutually disjoint. However, in real-life scenarios obstacles may intersect due to expanded obstacle regions corresponding to robot radius or safety margins. To broaden the applicability of aforementioned reactive motion planning methods, we propose a method to transform a workspace of intersecting obstacles to a disjoint star world. The algorithm is based on two novel concepts presented here, namely admissible kernel and starshaped hull with specified kernel, which are closely related to the notion of starshaped hull. The utilization of the proposed method is illustrated with examples of a robot operating in a 2D workspace using a harmonic potential field approach in combination with the developed algorithm.