 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Fire Fighting with a UAV-UGV Team at MBZIRC 2020
Paper and Code
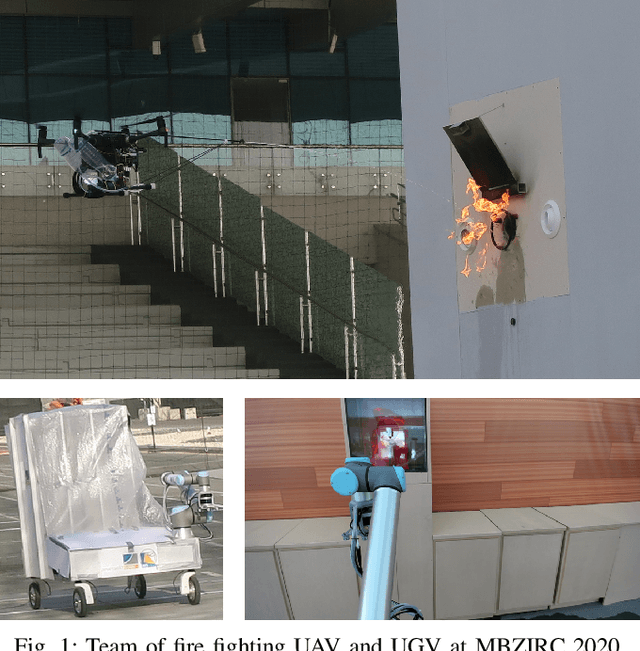
Every day, burning buildings threaten the lives of occupants and first responders trying to save them. Quick action is of essence, but some areas might not be accessible or too dangerous to enter. Robotic systems have become a promising addition to firefighting, but at this stage, they are mostly manually controlled, which is error-prone and requires specially trained personal. We present two systems for autonomous firefighting from air and ground we developed for the Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2020. The systems use LiDAR for reliable localization within narrow, potentially GNSS-restricted environments while maneuvering close to obstacles. Measurements from LiDAR and thermal cameras are fused to track fires, while relative navigation ensures successful extinguishing. We analyze and discuss our successful participation during the MBZIRC 2020, present further experiments, and provide insights into our lessons learned from the competition.