Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRendering and Tracking the Directional TSDF: Modeling Surface Orientation for Coherent Maps
Paper and Code
Aug 18, 2021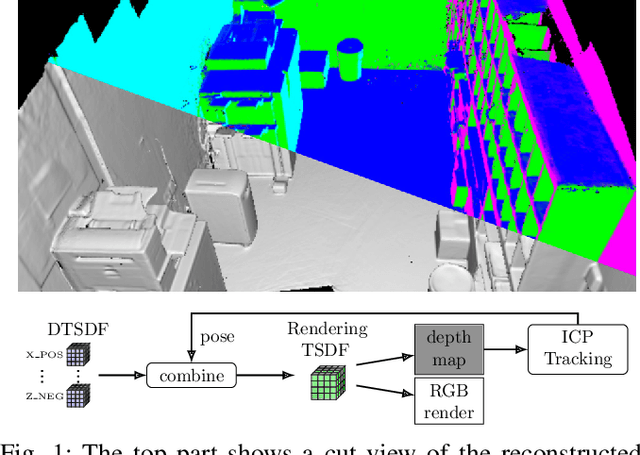

Dense real-time tracking and mapping from RGB-D images is an important tool for many robotic applications, such as navigation or grasping. The recently presented Directional Truncated Signed Distance Function (DTSDF) is an augmentation of the regular TSDF and shows potential for more coherent maps and improved tracking performance. In this work, we present methods for rendering depth- and color maps from the DTSDF, making it a true drop-in replacement for the regular TSDF in established trackers. We evaluate and show, that our method increases re-usability of mapped scenes. Furthermore, we add color integration which notably improves color-correctness at adjacent surfaces.
* to be published in 10th European Conference on Mobile Robots (ECMR
2021)
View paper on