 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRemote Mobile Manipulation with the Centauro Robot: Full-body Telepresence and Autonomous Operator Assistance
Aug 05, 2019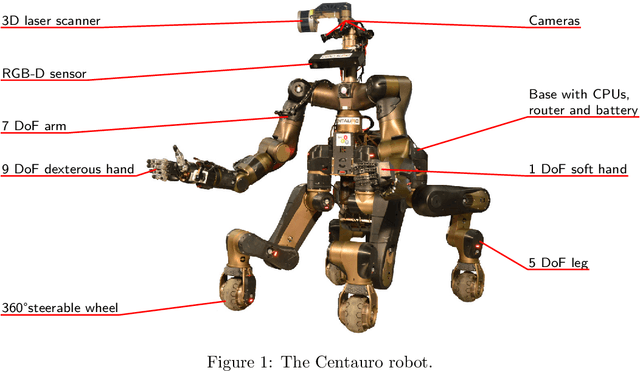
Solving mobile manipulation tasks in inaccessible and dangerous environments is an important application of robots to support humans. Example domains are construction and maintenance of manned and unmanned stations on the moon and other planets. Suitable platforms require flexible and robust hardware, a locomotion approach that allows for navigating a wide variety of terrains, dexterous manipulation capabilities, and respective user interfaces. We present the CENTAURO system which has been designed for these requirements and consists of the Centauro robot and a set of advanced operator interfaces with complementary strength enabling the system to solve a wide range of realistic mobile manipulation tasks. The robot possesses a centaur-like body plan and is driven by torque-controlled compliant actuators. Four articulated legs ending in steerable wheels allow for omnidirectional driving as well as for making steps. An anthropomorphic upper body with two arms ending in five-finger hands enables human-like manipulation. The robot perceives its environment through a suite of multimodal sensors. The resulting platform complexity goes beyond the complexity of most known systems which puts the focus on a suitable operator interface. An operator can control the robot through a telepresence suit, which allows for flexibly solving a large variety of mobile manipulation tasks. Locomotion and manipulation functionalities on different levels of autonomy support the operation. The proposed user interfaces enable solving a wide variety of tasks without previous task-specific training. The integrated system is evaluated in numerous teleoperated experiments that are described along with lessons learned.
Supervised Autonomous Locomotion and Manipulation for Disaster Response with a Centaur-like Robot
Mar 06, 2019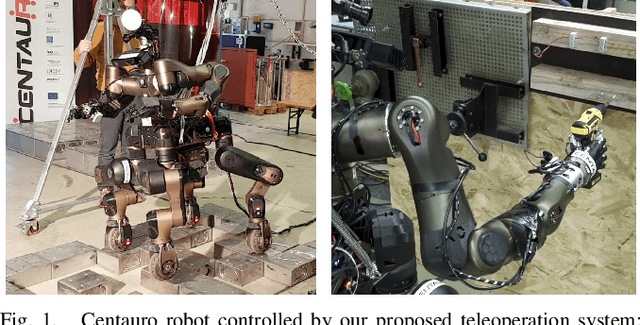
Mobile manipulation tasks are one of the key challenges in the field of search and rescue (SAR) robotics requiring robots with flexible locomotion and manipulation abilities. Since the tasks are mostly unknown in advance, the robot has to adapt to a wide variety of terrains and workspaces during a mission. The centaur-like robot Centauro has a hybrid legged-wheeled base and an anthropomorphic upper body to carry out complex tasks in environments too dangerous for humans. Due to its high number of degrees of freedom, controlling the robot with direct teleoperation approaches is challenging and exhausting. Supervised autonomy approaches are promising to increase quality and speed of control while keeping the flexibility to solve unknown tasks. We developed a set of operator assistance functionalities with different levels of autonomy to control the robot for challenging locomotion and manipulation tasks. The integrated system was evaluated in disaster response scenarios and showed promising performance.
Feature-based visual odometry prior for real-time semi-dense stereo SLAM
Oct 17, 2018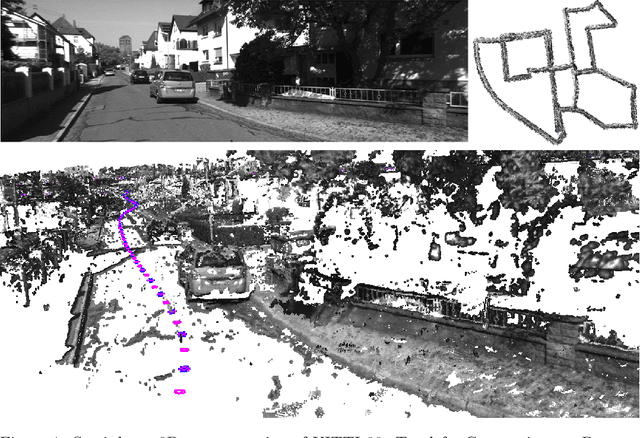
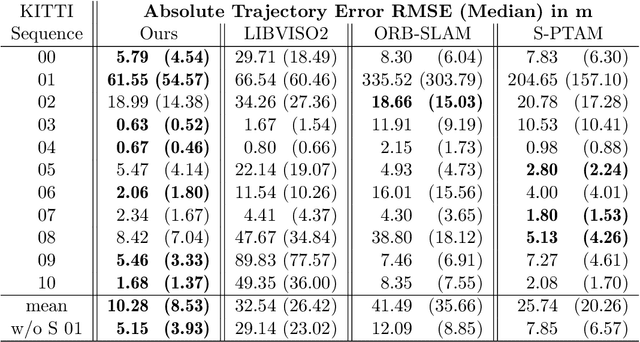
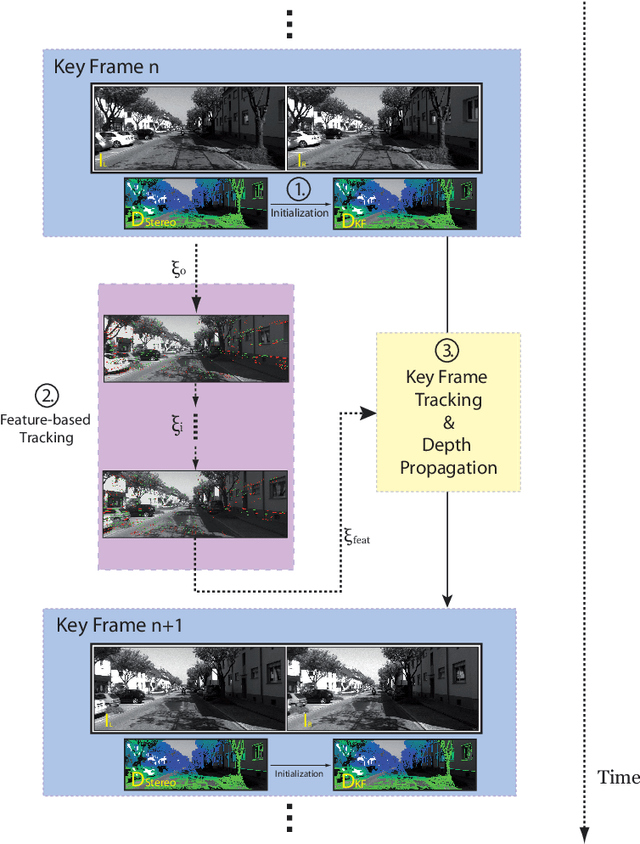
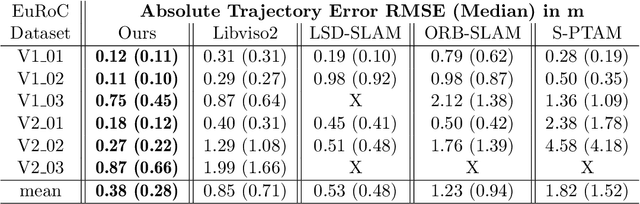
Robust and fast motion estimation and mapping is a key prerequisite for autonomous operation of mobile robots. The goal of performing this task solely on a stereo pair of video cameras is highly demanding and bears conflicting objectives: on one hand, the motion has to be tracked fast and reliably, on the other hand, high-level functions like navigation and obstacle avoidance depend crucially on a complete and accurate environment representation. In this work, we propose a two-layer approach for visual odometry and SLAM with stereo cameras that runs in real-time and combines feature-based matching with semi-dense direct image alignment. Our method initializes semi-dense depth estimation, which is computationally expensive, from motion that is tracked by a fast but robust keypoint-based method. Experiments on public benchmark and proprietary datasets show that our approach is faster than state-of-the-art methods without losing accuracy and yields comparable map building capabilities. Moreover, our approach is shown to handle large inter-frame motion and illumination changes much more robustly than its direct counterparts.
Efficient Continuous-Time SLAM for 3D Lidar-Based Online Mapping
Oct 16, 2018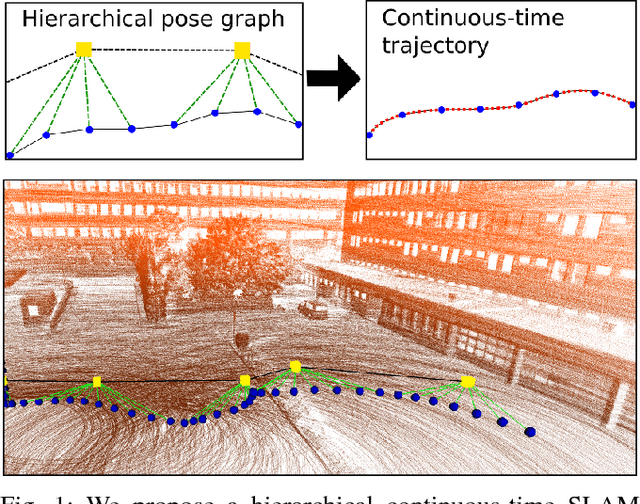
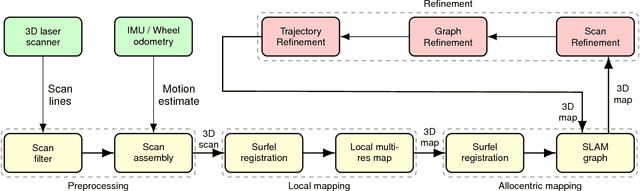
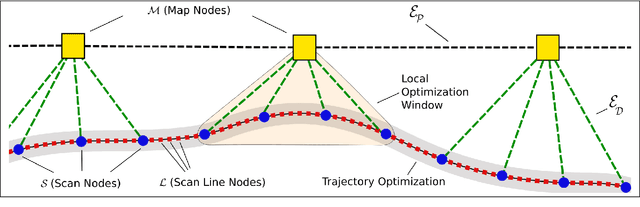
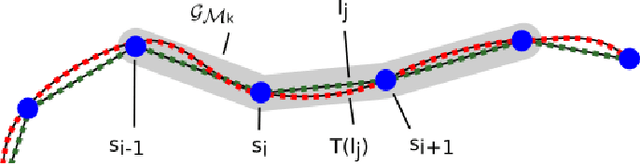
Modern 3D laser-range scanners have a high data rate, making online simultaneous localization and mapping (SLAM) computationally challenging. Recursive state estimation techniques are efficient but commit to a state estimate immediately after a new scan is made, which may lead to misalignments of measurements. We present a 3D SLAM approach that allows for refining alignments during online mapping. Our method is based on efficient local mapping and a hierarchical optimization back-end. Measurements of a 3D laser scanner are aggregated in local multiresolution maps by means of surfel-based registration. The local maps are used in a multi-level graph for allocentric mapping and localization. In order to incorporate corrections when refining the alignment, the individual 3D scans in the local map are modeled as a sub-graph and graph optimization is performed to account for drift and misalignments in the local maps. Furthermore, in each sub-graph, a continuous-time representation of the sensor trajectory allows to correct measurements between scan poses. We evaluate our approach in multiple experiments by showing qualitative results. Furthermore, we quantify the map quality by an entropy-based measure.
NimbRo Rescue: Solving Disaster-Response Tasks through Mobile Manipulation Robot Momaro
Oct 15, 2018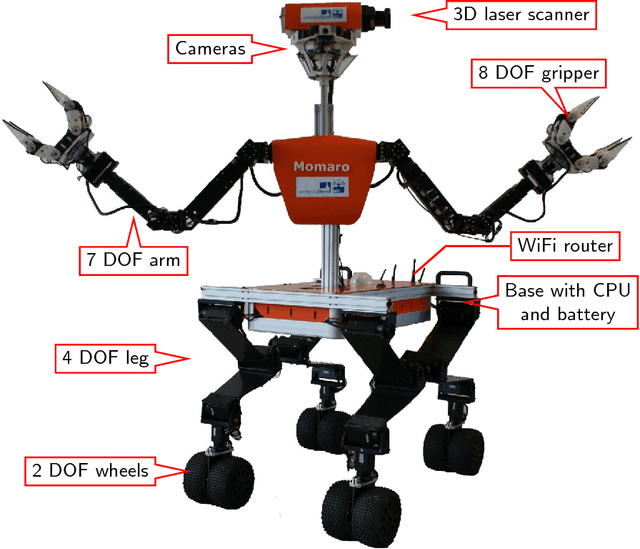
Robots that solve complex tasks in environments too dangerous for humans to enter are desperately needed, e.g. for search and rescue applications. We describe our mobile manipulation robot Momaro, with which we participated successfully in the DARPA Robotics Challenge. It features a unique locomotion design with four legs ending in steerable wheels, which allows it both to drive omnidirectionally and to step over obstacles or climb. Furthermore, we present advanced communication and teleoperation approaches, which include immersive 3D visualization, and 6D tracking of operator head and arm motions. The proposed system is evaluated in the DARPA Robotics Challenge, the DLR SpaceBot Cup Qualification and lab experiments. We also discuss the lessons learned from the competitions.
Team NimbRo at MBZIRC 2017: Autonomous Valve Stem Turning using a Wrench
Oct 06, 2018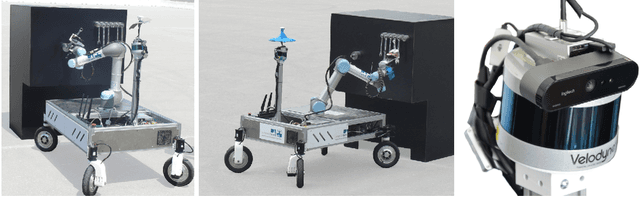
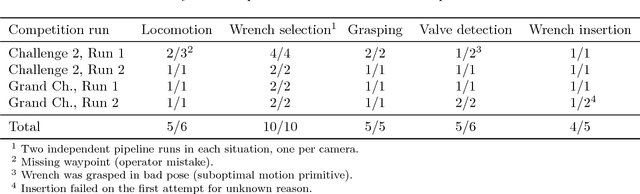
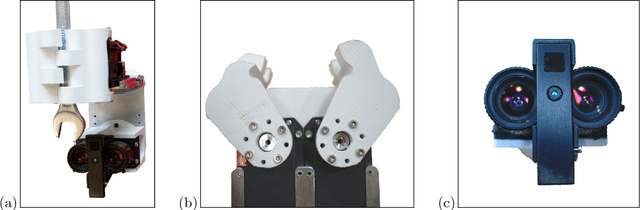
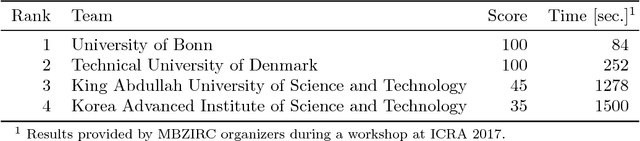
The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2017 has defined ambitious new benchmarks to advance the state-of-the-art in autonomous operation of ground-based and flying robots. In this article, we describe our winning entry to MBZIRC Challenge 2: the mobile manipulation robot Mario. It is capable of autonomously solving a valve manipulation task using a wrench tool detected, grasped, and finally employed to turn a valve stem. Mario's omnidirectional base allows both fast locomotion and precise close approach to the manipulation panel. We describe an efficient detector for medium-sized objects in 3D laser scans and apply it to detect the manipulation panel. An object detection architecture based on deep neural networks is used to find and select the correct tool from grayscale images. Parametrized motion primitives are adapted online to percepts of the tool and valve stem in order to turn the stem. We report in detail on our winning performance at the challenge and discuss lessons learned.
Fast Autonomous Flight in Warehouses for Inventory Applications
Sep 18, 2018
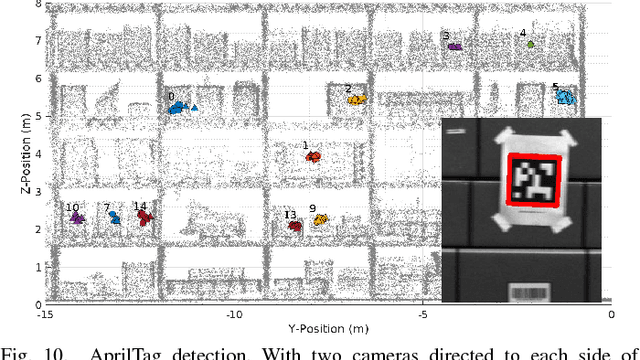
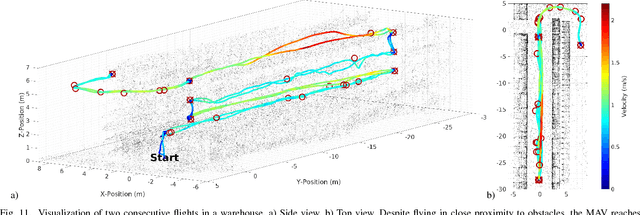
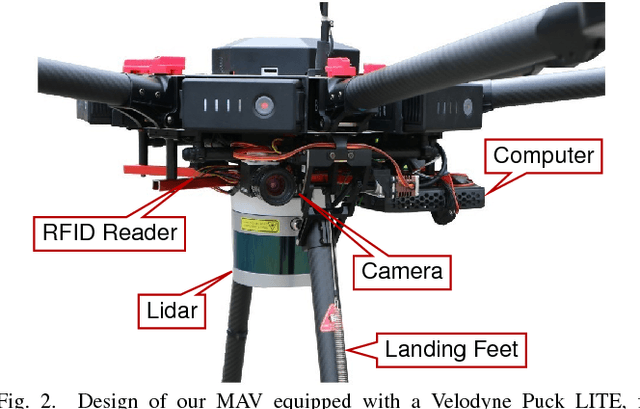
The past years have shown a remarkable growth in use-cases for micro aerial vehicles (MAVs). Conceivable indoor applications require highly robust environment perception, fast reaction to changing situations, and stable navigation, but reliable sources of absolute positioning like GNSS or compass measurements are unavailable during indoor flights. We present a high-performance autonomous inventory MAV for operation inside warehouses. The MAV navigates along warehouse aisles and detects the placed stock in the shelves alongside its path with a multimodal sensor setup containing an RFID reader and two high-resolution cameras. We describe in detail the SLAM pipeline based on a 3D lidar, the setup for stock recognition, the mission planning and trajectory generation, as well as a low-level routine for avoidance of dynamical or previously unobserved obstacles. Experiments were performed in an operative warehouse of a logistics provider, in which an external warehouse management system provided the MAV with high-level inspection missions that are executed fully autonomously.
* IEEE Robotics and Automation Letters (RA-L), 2018. Accepted for IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, October 2018. For supplementary material and videos, see http://ais.uni-bonn.de/videos/IROS_2018_InventAIRy/