 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearch-based 3D Planning and Trajectory Optimization for Safe Micro Aerial Vehicle Flight Under Sensor Visibility Constraints
Mar 12, 2019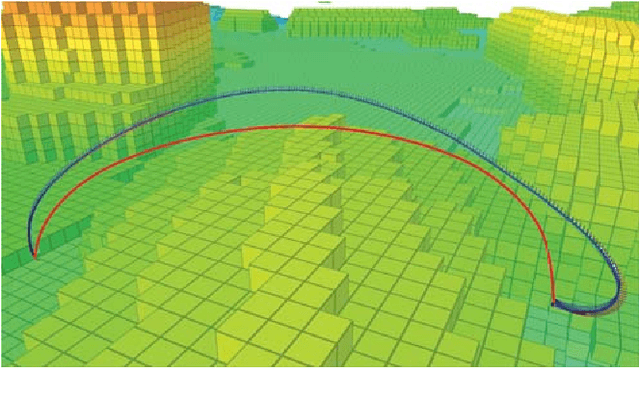

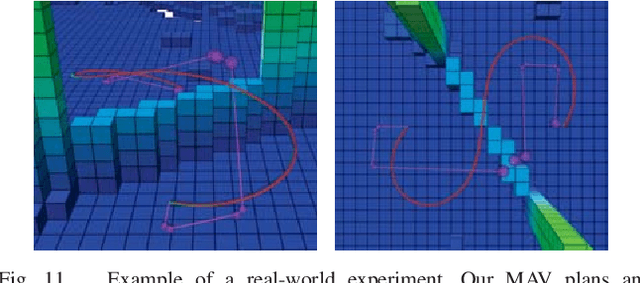
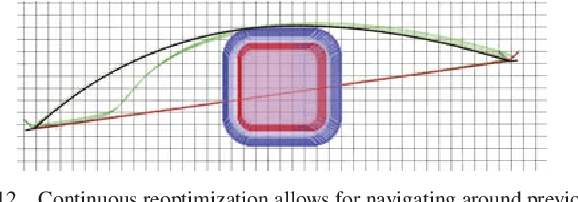
Safe navigation of Micro Aerial Vehicles (MAVs) requires not only obstacle-free flight paths according to a static environment map, but also the perception of and reaction to previously unknown and dynamic objects. This implies that the onboard sensors cover the current flight direction. Due to the limited payload of MAVs, full sensor coverage of the environment has to be traded off with flight time. Thus, often only a part of the environment is covered. We present a combined allocentric complete planning and trajectory optimization approach taking these sensor visibility constraints into account. The optimized trajectories yield flight paths within the apex angle of a Velodyne Puck Lite 3D laser scanner enabling low-level collision avoidance to perceive obstacles in the flight direction. Furthermore, the optimized trajectories take the flight dynamics into account and contain the velocities and accelerations along the path. We evaluate our approach with a DJI Matrice 600 MAV and in simulation employing hardware-in-the-loop.
Team NimbRo at MBZIRC 2017: Fast Landing on a Moving Target and Treasure Hunting with a Team of MAVs
Jan 02, 2019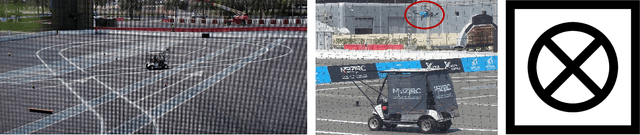
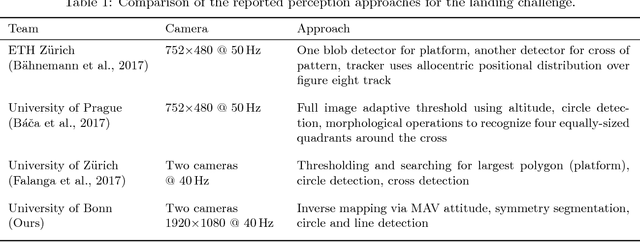
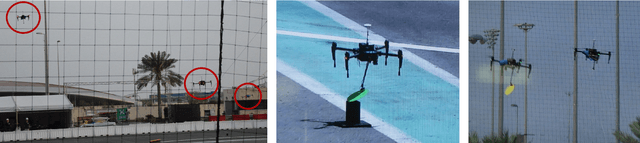
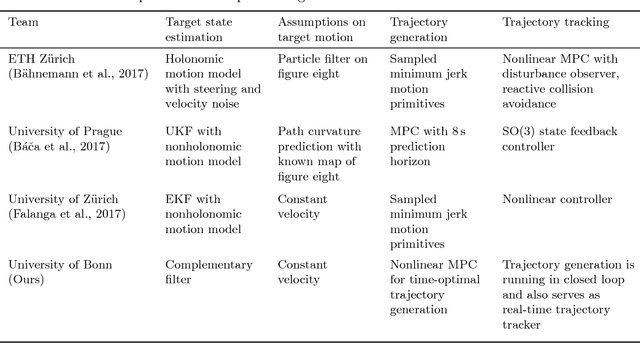
The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2017 has defined ambitious new benchmarks to advance the state-of-the-art in autonomous operation of ground-based and flying robots. This article covers our approaches to solve the two challenges that involved micro aerial vehicles (MAV). Challenge 1 required reliable target perception, fast trajectory planning, and stable control of an MAV in order to land on a moving vehicle. Challenge 3 demanded a team of MAVs to perform a search and transportation task, coined "Treasure Hunt", which required mission planning and multi-robot coordination as well as adaptive control to account for the additional object weight. We describe our base MAV setup and the challenge-specific extensions, cover the camera-based perception, explain control and trajectory-planning in detail, and elaborate on mission planning and team coordination. We evaluated our systems in simulation as well as with real-robot experiments during the competition in Abu Dhabi. With our system, we-as part of the larger team NimbRo-won the MBZIRC Grand Challenge and achieved a third place in both subchallenges involving flying robots.
Fast Autonomous Flight in Warehouses for Inventory Applications
Sep 18, 2018
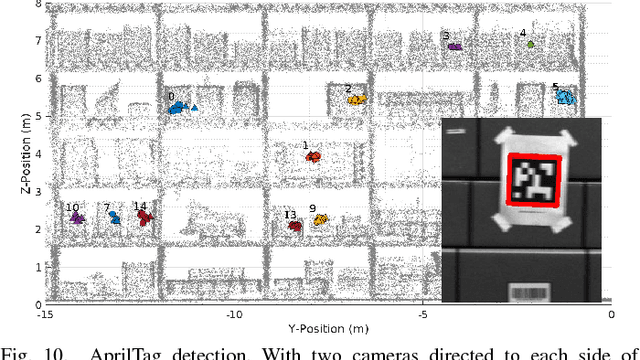
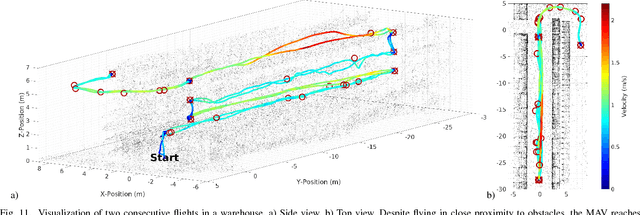
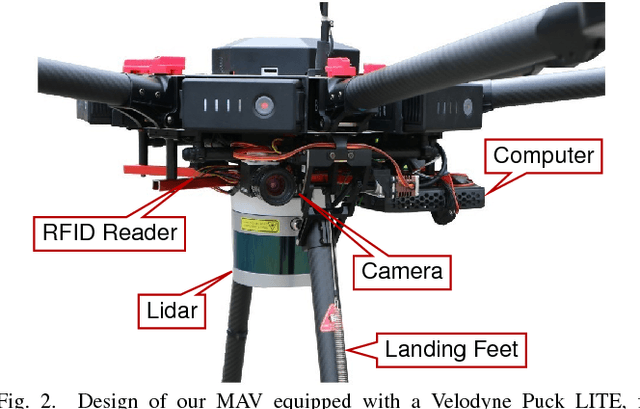
The past years have shown a remarkable growth in use-cases for micro aerial vehicles (MAVs). Conceivable indoor applications require highly robust environment perception, fast reaction to changing situations, and stable navigation, but reliable sources of absolute positioning like GNSS or compass measurements are unavailable during indoor flights. We present a high-performance autonomous inventory MAV for operation inside warehouses. The MAV navigates along warehouse aisles and detects the placed stock in the shelves alongside its path with a multimodal sensor setup containing an RFID reader and two high-resolution cameras. We describe in detail the SLAM pipeline based on a 3D lidar, the setup for stock recognition, the mission planning and trajectory generation, as well as a low-level routine for avoidance of dynamical or previously unobserved obstacles. Experiments were performed in an operative warehouse of a logistics provider, in which an external warehouse management system provided the MAV with high-level inspection missions that are executed fully autonomously.
* IEEE Robotics and Automation Letters (RA-L), 2018. Accepted for IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, October 2018. For supplementary material and videos, see http://ais.uni-bonn.de/videos/IROS_2018_InventAIRy/