 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Skeletonization for Plant Root Structure Reconstruction from MRI
Oct 27, 2020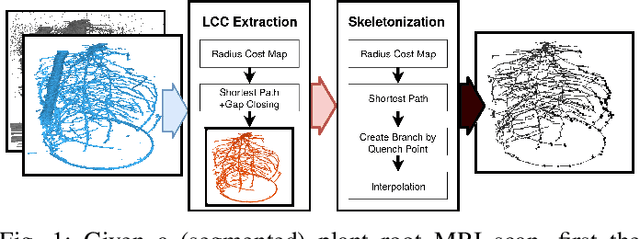
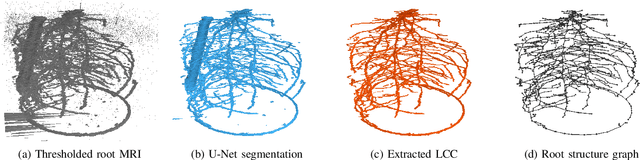
Structural reconstruction of plant roots from MRI is challenging, because of low resolution and low signal-to-noise ratio of the 3D measurements which may lead to disconnectivities and wrongly connected roots. We propose a two-stage approach for this task. The first stage is based on semantic root vs. soil segmentation and finds lowest-cost paths from any root voxel to the shoot. The second stage takes the largest fully connected component generated in the first stage and uses 3D skeletonization to extract a graph structure. We evaluate our method on 22 MRI scans and compare to human expert reconstructions.
Learning Super-resolution 3D Segmentation of Plant Root MRI Images from Few Examples
Mar 16, 2019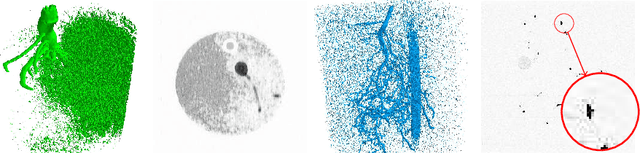
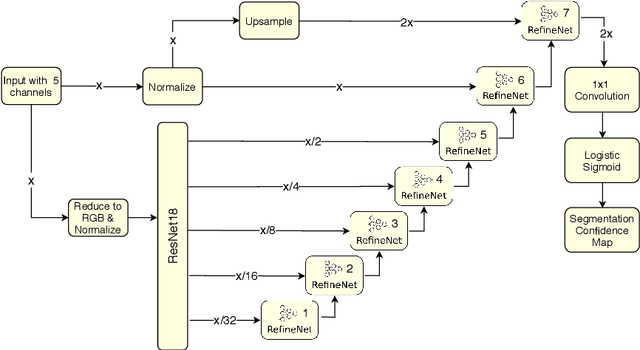
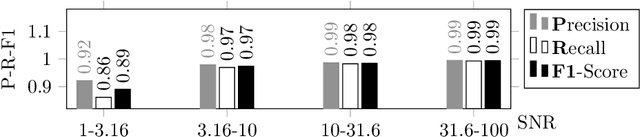
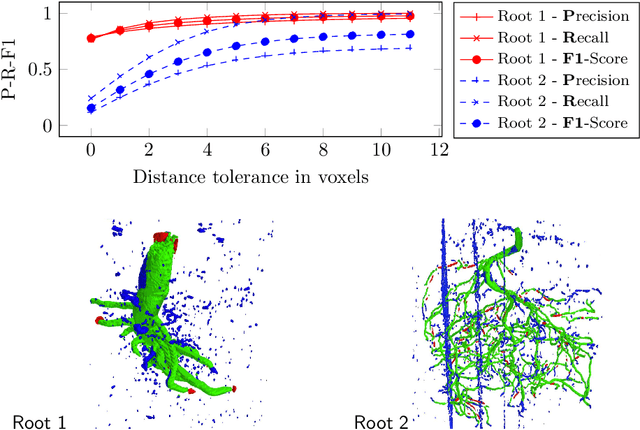
Analyzing plant roots is crucial to understand plant performance in different soil environments. While magnetic resonance imaging (MRI) can be used to obtain 3D images of plant roots, extracting the root structural model is challenging due to highly noisy soil environments and low-resolution of MRI images. To improve both contrast and resolution, we adapt the state-of-the-art method RefineNet for 3D segmentation of the plant root MRI images in super-resolution. The networks are trained from few manual segmentations that are augmented by geometric transformations, realistic noise, and other variabilities. The resulting segmentations contain most root structures, including branches not extracted by the human annotator.
Team NimbRo at MBZIRC 2017: Fast Landing on a Moving Target and Treasure Hunting with a Team of MAVs
Jan 02, 2019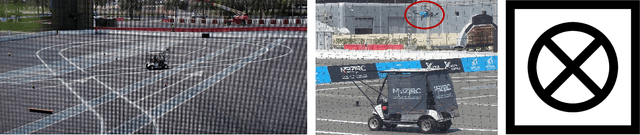
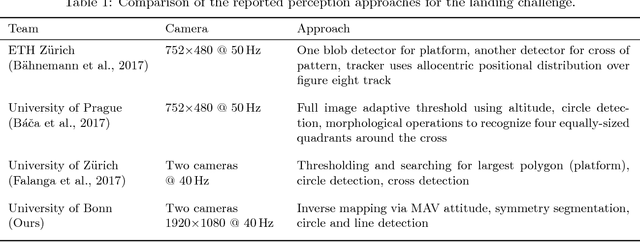
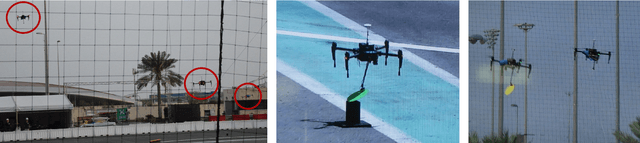
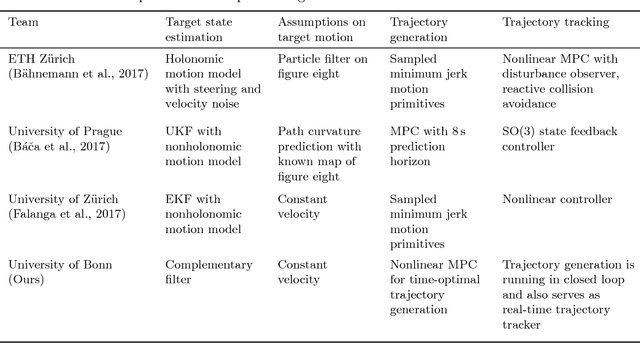
The Mohamed Bin Zayed International Robotics Challenge (MBZIRC) 2017 has defined ambitious new benchmarks to advance the state-of-the-art in autonomous operation of ground-based and flying robots. This article covers our approaches to solve the two challenges that involved micro aerial vehicles (MAV). Challenge 1 required reliable target perception, fast trajectory planning, and stable control of an MAV in order to land on a moving vehicle. Challenge 3 demanded a team of MAVs to perform a search and transportation task, coined "Treasure Hunt", which required mission planning and multi-robot coordination as well as adaptive control to account for the additional object weight. We describe our base MAV setup and the challenge-specific extensions, cover the camera-based perception, explain control and trajectory-planning in detail, and elaborate on mission planning and team coordination. We evaluated our systems in simulation as well as with real-robot experiments during the competition in Abu Dhabi. With our system, we-as part of the larger team NimbRo-won the MBZIRC Grand Challenge and achieved a third place in both subchallenges involving flying robots.