 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Large-Scale Rendering of Simulated Crops for Synthetic Ground Truth Generation on Modular Supercomputers
Oct 28, 2021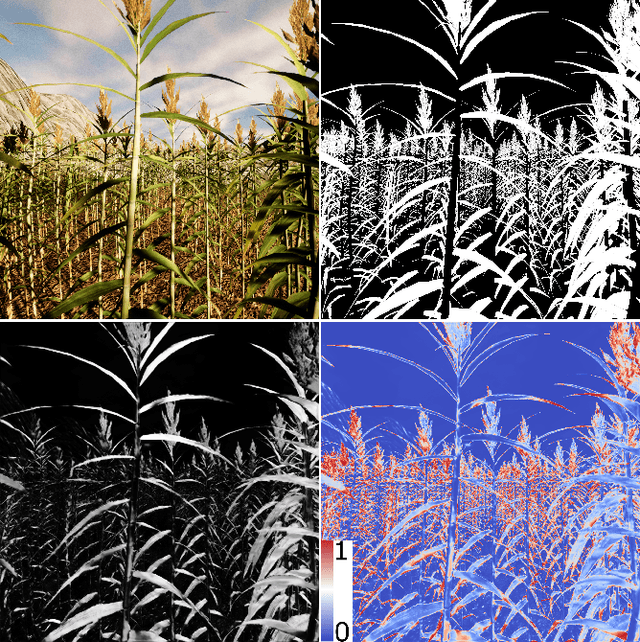
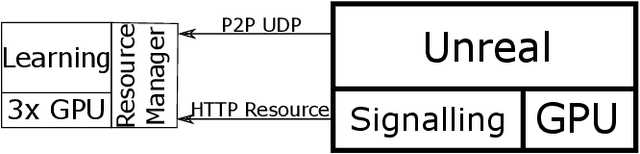
Computer Vision problems deal with the semantic extraction of information from camera images. Especially for field crop images, the underlying problems are hard to label and even harder to learn, and the availability of high-quality training data is low. Deep neural networks do a good job of extracting the necessary models from training examples. However, they rely on an abundance of training data that is not feasible to generate or label by expert annotation. To address this challenge, we make use of the Unreal Engine to render large and complex virtual scenes. We rely on the performance of individual nodes by distributing plant simulations across nodes and both generate scenes as well as train neural networks on GPUs, restricting node communication to parallel learning.
Robust Skeletonization for Plant Root Structure Reconstruction from MRI
Oct 27, 2020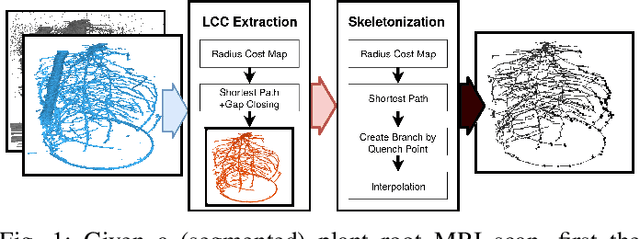
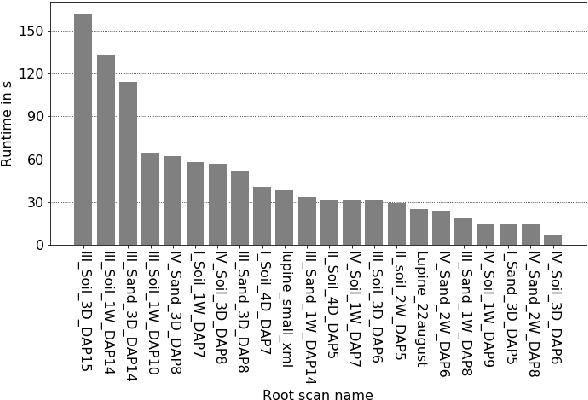
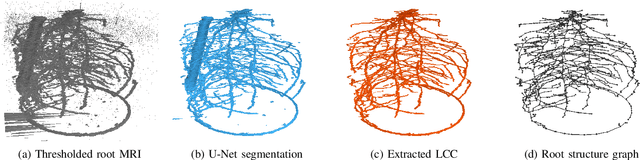
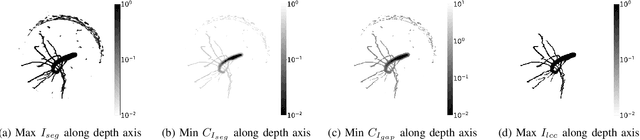
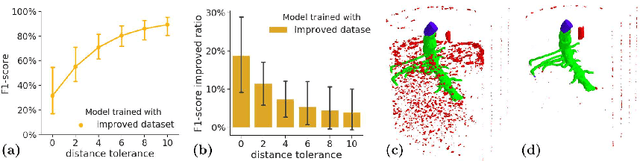
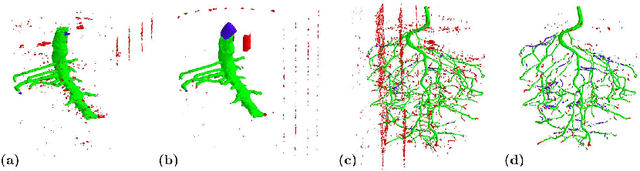
Structural reconstruction of plant roots from MRI is challenging, because of low resolution and low signal-to-noise ratio of the 3D measurements which may lead to disconnectivities and wrongly connected roots. We propose a two-stage approach for this task. The first stage is based on semantic root vs. soil segmentation and finds lowest-cost paths from any root voxel to the shoot. The second stage takes the largest fully connected component generated in the first stage and uses 3D skeletonization to extract a graph structure. We evaluate our method on 22 MRI scans and compare to human expert reconstructions.
3D U-Net for Segmentation of Plant Root MRI Images in Super-Resolution
Feb 21, 2020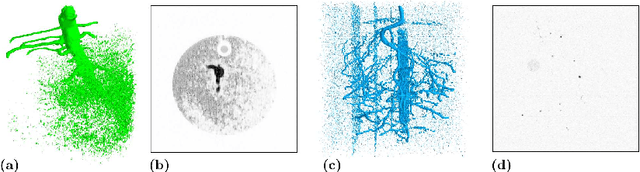
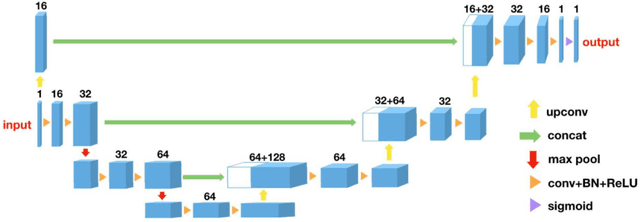
Magnetic resonance imaging (MRI) enables plant scientists to non-invasively study root system development and root-soil interaction. Challenging recording conditions, such as low resolution and a high level of noise hamper the performance of traditional root extraction algorithms, though. We propose to increase signal-to-noise ratio and resolution by segmenting the scanned volumes into root and soil in super-resolution using a 3D U-Net. Tests on real data show that the trained network is capable to detect most roots successfully and even finds roots that were missed by human annotators. Our experiments show that the segmentation performance can be further improved with modifications of the loss function.