 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNimbRo Rescue: Solving Disaster-Response Tasks through Mobile Manipulation Robot Momaro
Paper and Code
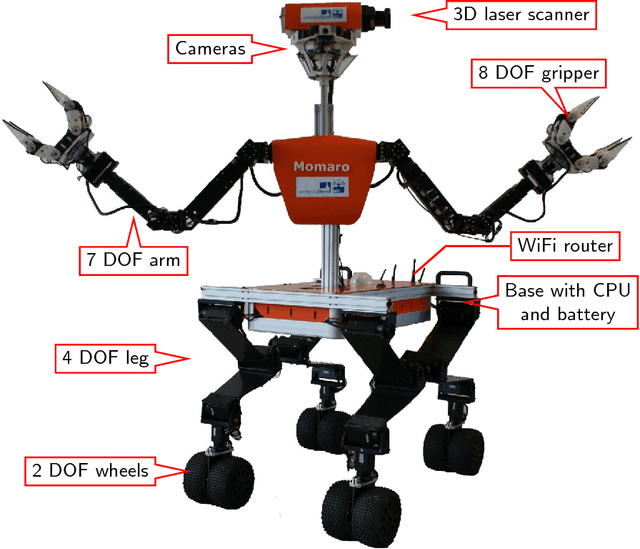
Robots that solve complex tasks in environments too dangerous for humans to enter are desperately needed, e.g. for search and rescue applications. We describe our mobile manipulation robot Momaro, with which we participated successfully in the DARPA Robotics Challenge. It features a unique locomotion design with four legs ending in steerable wheels, which allows it both to drive omnidirectionally and to step over obstacles or climb. Furthermore, we present advanced communication and teleoperation approaches, which include immersive 3D visualization, and 6D tracking of operator head and arm motions. The proposed system is evaluated in the DARPA Robotics Challenge, the DLR SpaceBot Cup Qualification and lab experiments. We also discuss the lessons learned from the competitions.