 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContrastive learning of cell state dynamics in response to perturbations
Oct 15, 2024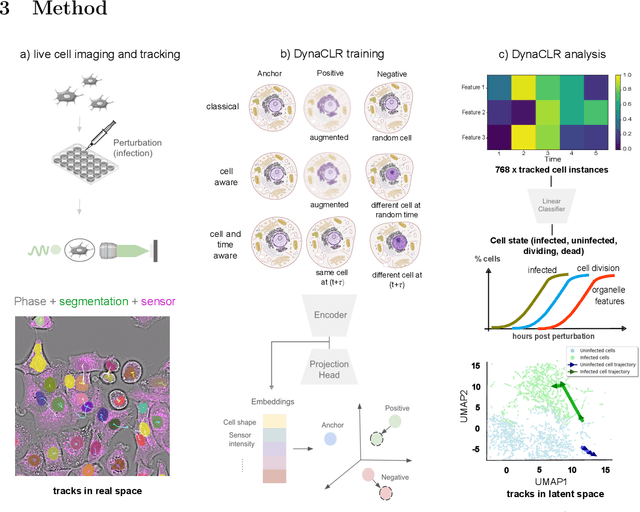
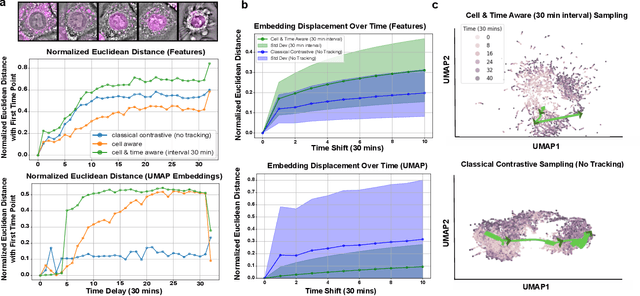
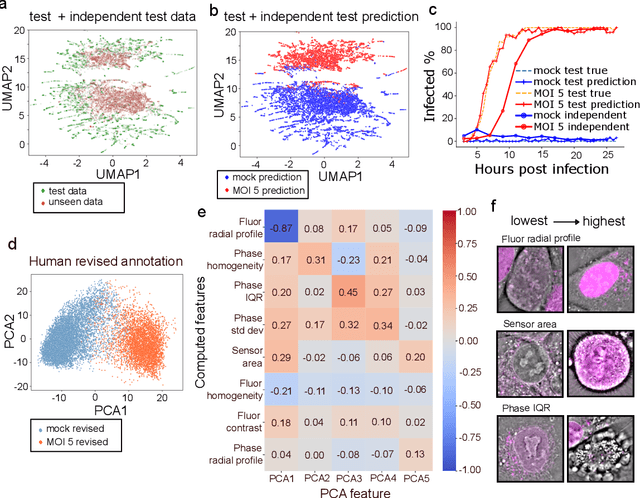
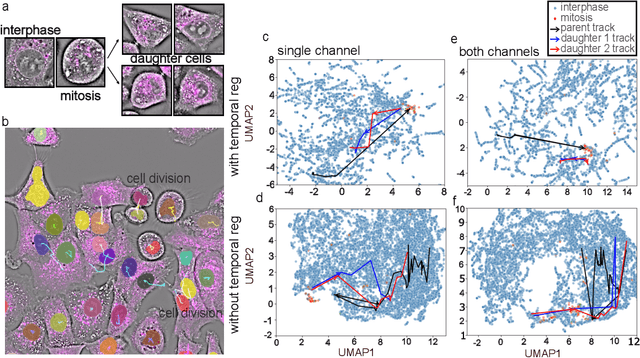
We introduce DynaCLR, a self-supervised framework for modeling cell dynamics via contrastive learning of representations of time-lapse datasets. Live cell imaging of cells and organelles is widely used to analyze cellular responses to perturbations. Human annotation of dynamic cell states captured by time-lapse perturbation datasets is laborious and prone to bias. DynaCLR integrates single-cell tracking with time-aware contrastive learning to map images of cells at neighboring time points to neighboring embeddings. Mapping the morphological dynamics of cells to a temporally regularized embedding space makes the annotation, classification, clustering, or interpretation of the cell states more quantitative and efficient. We illustrate the features and applications of DynaCLR with the following experiments: analyzing the kinetics of viral infection in human cells, detecting transient changes in cell morphology due to cell division, and mapping the dynamics of organelles due to viral infection. Models trained with DynaCLR consistently achieve $>95\%$ accuracy for infection state classification, enable the detection of transient cell states and reliably embed unseen experiments. DynaCLR provides a flexible framework for comparative analysis of cell state dynamics due to perturbations, such as infection, gene knockouts, and drugs. We provide PyTorch-based implementations of the model training and inference pipeline (https://github.com/mehta-lab/viscy) and a user interface (https://github.com/czbiohub-sf/napari-iohub) for the visualization and annotation of trajectories of cells in the real space and the embedding space.
Origin of life from a maker's perspective -- focus on protocellular compartments in bottom-up synthetic biology
Jul 14, 2022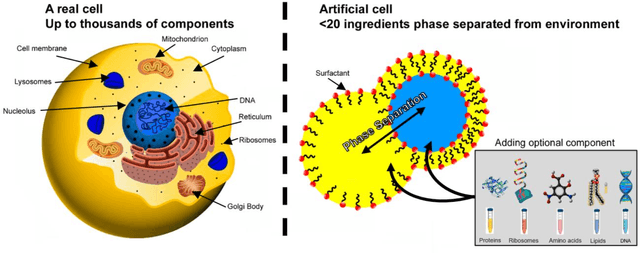

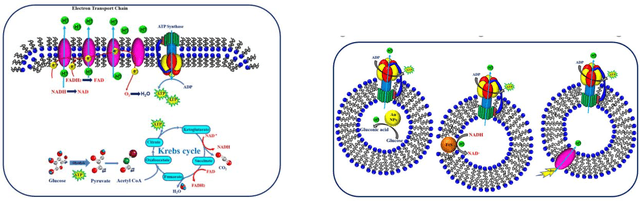
The origin of life is shrouded in mystery, with few surviving clues, obscured by evolutionary competition. Previous reviews have touched on the complementary approaches of top-down and bottom-up synthetic biology to augment our understanding of living systems. Here we point out the synergies between these fields, especially between bottom-up synthetic biology and origin of life research. We explore recent progress made in artificial cell compartmentation in line with the crowded cell, its metabolism, as well as cycles of growth and division, and how those efforts are starting to be combined. Though the complexity of current life is among its most striking characteristics, none of life's essential features require it, and they are unlikely to have emerged thus complex from the beginning. Rather than recovering the one true origin lost in time, current research converges towards reproducing the emergence of minimal life, by teasing out how complexity and evolution may arise from a set of essential components.
NimbRo Rescue: Solving Disaster-Response Tasks through Mobile Manipulation Robot Momaro
Oct 15, 2018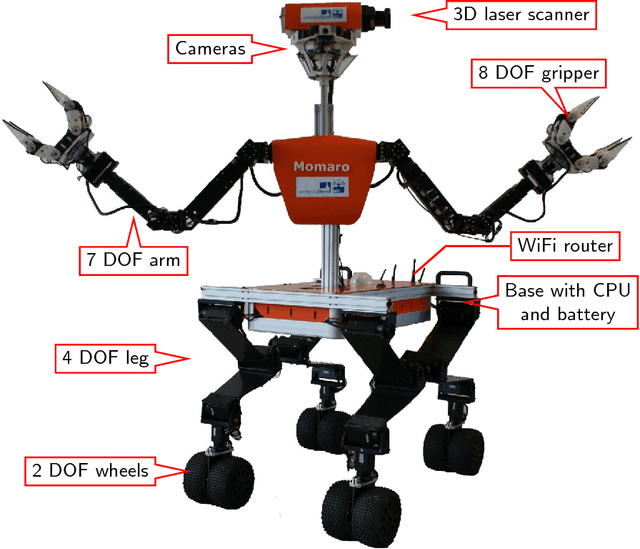
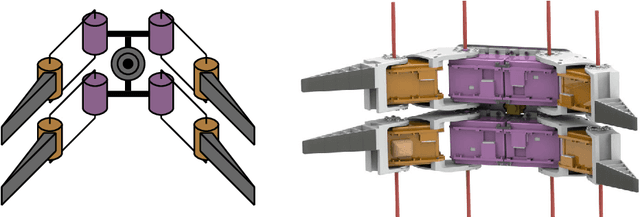
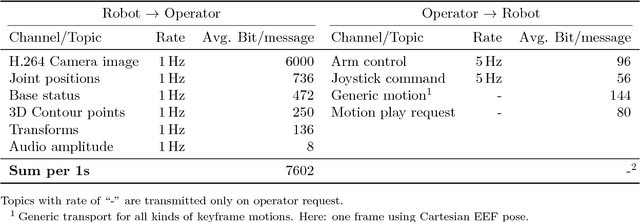
Robots that solve complex tasks in environments too dangerous for humans to enter are desperately needed, e.g. for search and rescue applications. We describe our mobile manipulation robot Momaro, with which we participated successfully in the DARPA Robotics Challenge. It features a unique locomotion design with four legs ending in steerable wheels, which allows it both to drive omnidirectionally and to step over obstacles or climb. Furthermore, we present advanced communication and teleoperation approaches, which include immersive 3D visualization, and 6D tracking of operator head and arm motions. The proposed system is evaluated in the DARPA Robotics Challenge, the DLR SpaceBot Cup Qualification and lab experiments. We also discuss the lessons learned from the competitions.