 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
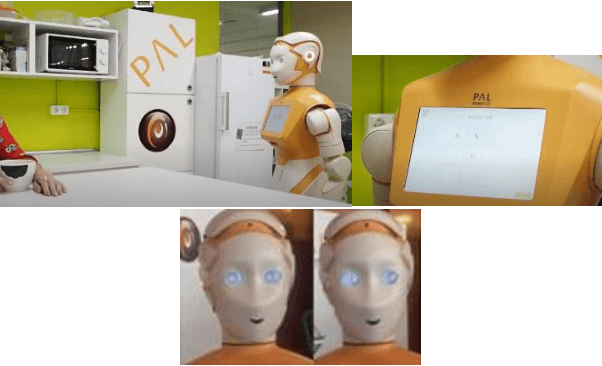
Add to EdgeSocially Pertinent Robots in Gerontological Healthcare
Apr 11, 2024
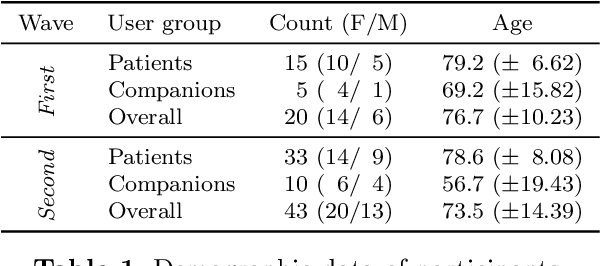
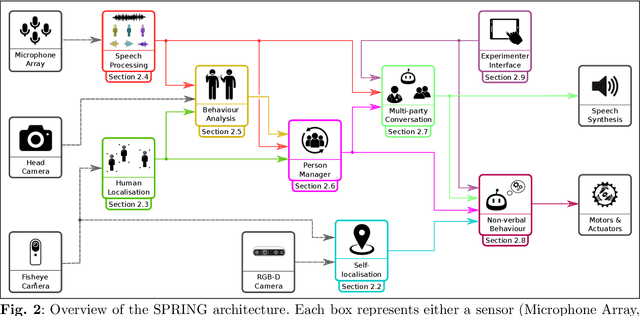
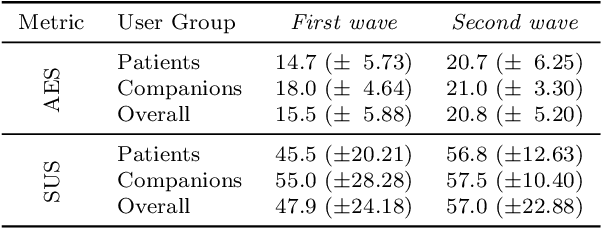
Despite the many recent achievements in developing and deploying social robotics, there are still many underexplored environments and applications for which systematic evaluation of such systems by end-users is necessary. While several robotic platforms have been used in gerontological healthcare, the question of whether or not a social interactive robot with multi-modal conversational capabilities will be useful and accepted in real-life facilities is yet to be answered. This paper is an attempt to partially answer this question, via two waves of experiments with patients and companions in a day-care gerontological facility in Paris with a full-sized humanoid robot endowed with social and conversational interaction capabilities. The software architecture, developed during the H2020 SPRING project, together with the experimental protocol, allowed us to evaluate the acceptability (AES) and usability (SUS) with more than 60 end-users. Overall, the users are receptive to this technology, especially when the robot perception and action skills are robust to environmental clutter and flexible to handle a plethora of different interactions.
Modeling and Numerical Analysis of Kangaroo Lower Body based on Constrained Dynamics of Hybrid Serial-Parallel Floating-Base Systems
Dec 07, 2023This paper presents the modeling and numerical analysis of the Kangaroo lower body prototype, a novel bipedal humanoid robot developed and manufactured by PAL Robotics. Kangaroo features high-power linear electric actuators combined with unique serial-parallel hybrid chains, which allow for the positioning of all the leg actuators near the base of the robot in order to improve the overall mass distribution. To model and analyze such complex nonlinear mechanisms, we employ a constrained formulation that is extended to account for floating-base systems in contact with the environment. A comparison is made to demonstrate the significant improvements achieved with TALOS, another humanoid bipedal robot designed by PAL Robotics, in terms of equivalent Cartesian inertia at the feet and centroidal angular momentum. Finally, the paper includes numerical experiments conducted through simulation and preliminary tests performed on the actual Kangaroo platform.
Robot to support older people to live independently
Apr 15, 2021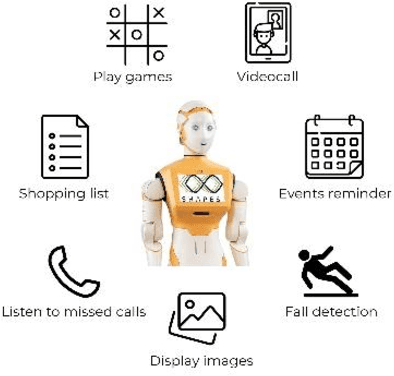
This paper presents an overview on how the PAL Robotics ARI robot is participating in the European SHAPES project to promote healthy and active living among older people, by integrating digital solutions from project partners and adapting the system in order to improve human-robot interaction and user acceptability in a wide range of tasks.