 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocially Pertinent Robots in Gerontological Healthcare
Apr 11, 2024
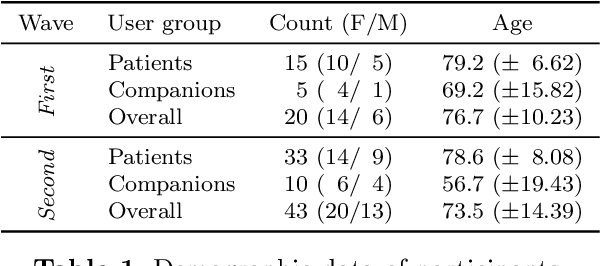
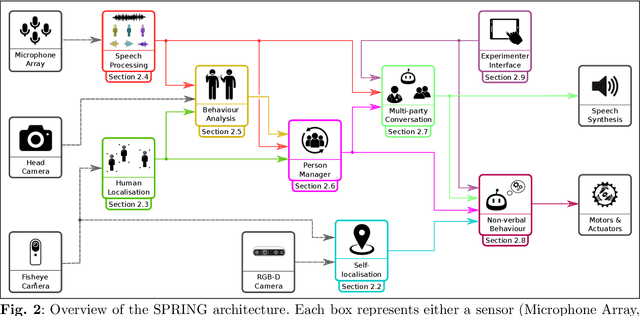
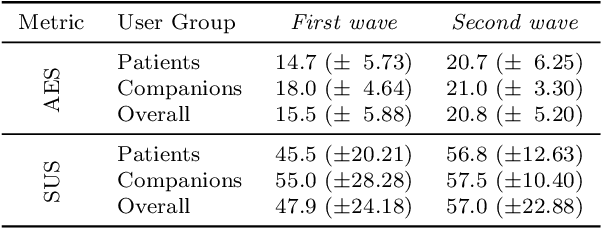
Despite the many recent achievements in developing and deploying social robotics, there are still many underexplored environments and applications for which systematic evaluation of such systems by end-users is necessary. While several robotic platforms have been used in gerontological healthcare, the question of whether or not a social interactive robot with multi-modal conversational capabilities will be useful and accepted in real-life facilities is yet to be answered. This paper is an attempt to partially answer this question, via two waves of experiments with patients and companions in a day-care gerontological facility in Paris with a full-sized humanoid robot endowed with social and conversational interaction capabilities. The software architecture, developed during the H2020 SPRING project, together with the experimental protocol, allowed us to evaluate the acceptability (AES) and usability (SUS) with more than 60 end-users. Overall, the users are receptive to this technology, especially when the robot perception and action skills are robust to environmental clutter and flexible to handle a plethora of different interactions.
Proceedings of the AI-HRI Symposium at AAAI-FSS 2022
Sep 28, 2022The Artificial Intelligence (AI) for Human-Robot Interaction (HRI) Symposium has been a successful venue of discussion and collaboration on AI theory and methods aimed at HRI since 2014. This year, after a review of the achievements of the AI-HRI community over the last decade in 2021, we are focusing on a visionary theme: exploring the future of AI-HRI. Accordingly, we added a Blue Sky Ideas track to foster a forward-thinking discussion on future research at the intersection of AI and HRI. As always, we appreciate all contributions related to any topic on AI/HRI and welcome new researchers who wish to take part in this growing community. With the success of past symposia, AI-HRI impacts a variety of communities and problems, and has pioneered the discussions in recent trends and interests. This year's AI-HRI Fall Symposium aims to bring together researchers and practitioners from around the globe, representing a number of university, government, and industry laboratories. In doing so, we hope to accelerate research in the field, support technology transition and user adoption, and determine future directions for our group and our research.
AI-HRI 2021 Proceedings
Sep 23, 2021The Artificial Intelligence (AI) for Human-Robot Interaction (HRI) Symposium has been a successful venue of discussion and collaboration since 2014. During that time, these symposia provided a fertile ground for numerous collaborations and pioneered many discussions revolving trust in HRI, XAI for HRI, service robots, interactive learning, and more. This year, we aim to review the achievements of the AI-HRI community in the last decade, identify the challenges facing ahead, and welcome new researchers who wish to take part in this growing community. Taking this wide perspective, this year there will be no single theme to lead the symposium and we encourage AI-HRI submissions from across disciplines and research interests. Moreover, with the rising interest in AR and VR as part of an interaction and following the difficulties in running physical experiments during the pandemic, this year we specifically encourage researchers to submit works that do not include a physical robot in their evaluation, but promote HRI research in general. In addition, acknowledging that ethics is an inherent part of the human-robot interaction, we encourage submissions of works on ethics for HRI. Over the course of the two-day meeting, we will host a collaborative forum for discussion of current efforts in AI-HRI, with additional talks focused on the topics of ethics in HRI and ubiquitous HRI.
Explainable Representations of the Social State: A Model for Social Human-Robot Interactions
Oct 09, 2020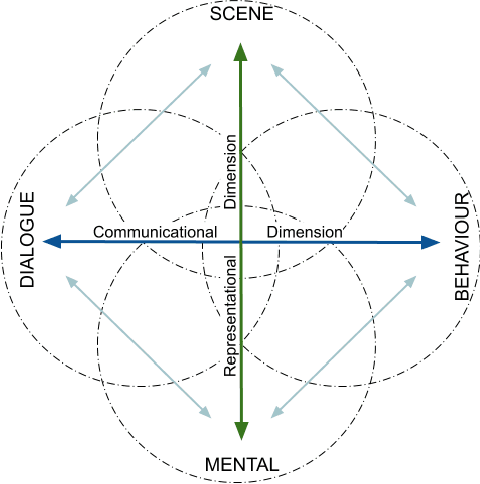
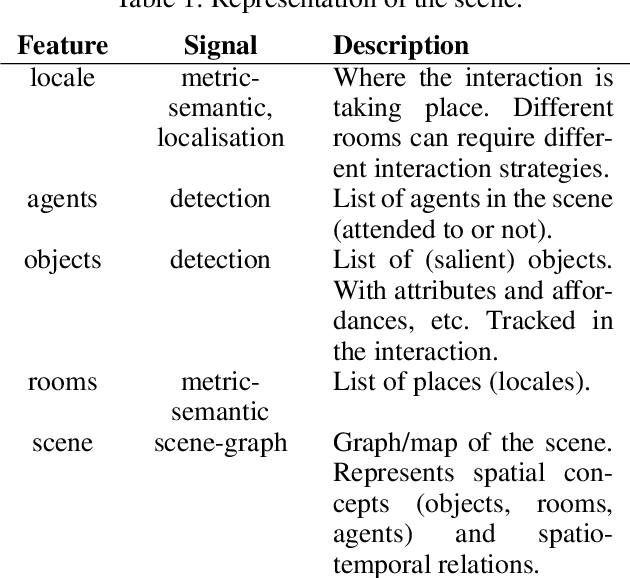
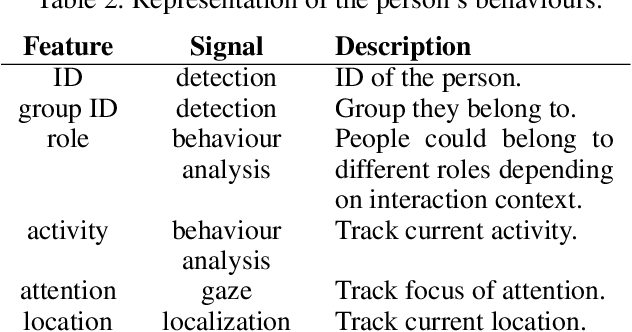
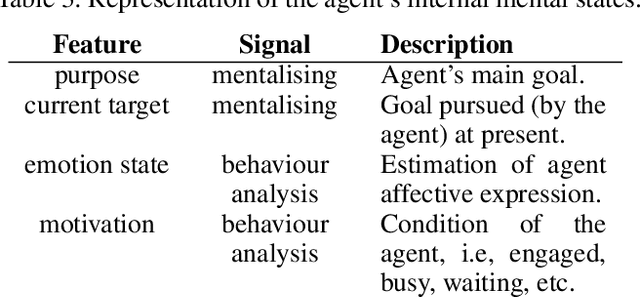
In this paper, we propose a minimum set of concepts and signals needed to track the social state during Human-Robot Interaction. We look into the problem of complex continuous interactions in a social context with multiple humans and robots, and discuss the creation of an explainable and tractable representation/model of their social interaction. We discuss these representations according to their representational and communicational properties, and organize them into four cognitive domains (scene-understanding, behaviour-profiling, mental-state, and dialogue-grounding).
Proceedings of the SREC Workshop at HRI 2019
Sep 05, 2019Robot-Assisted Therapy (RAT) has successfully been used in Human Robot Interaction (HRI) research by including social robots in health-care interventions by virtue of their ability to engage human users in both social and emotional dimensions. Robots used for these tasks must be designed with several user groups in mind, including both individuals receiving therapy and care professionals responsible for the treatment. These robots must also be able to perceive their context of use, recognize human actions and intentions, and follow the therapeutic goals to perform meaningful and personalized treatment. Effective interactions require for robots to be capable of coordinated, timely behavior in response to social cues. This means being able to estimate and predict levels of engagement, attention, intentionality and emotional state during human-robot interactions. An additional challenge for social robots in therapy and care is the wide range of needs and conditions the different users can have during their interventions, even if they may share the same pathologies their current requirements and the objectives of their therapies can varied extensively. Therefore, it becomes crucial for robots to adapt their behaviors and interaction scenario to the specific needs, preferences and requirements of the patients they interact with. This personalization should be considered in terms of the robot behavior and the intervention scenario and must reflect the needs, preferences and requirements of the user.
Proceedings of the Workshop on Social Robots in Therapy: Focusing on Autonomy and Ethical Challenges
Dec 18, 2018
Robot-Assisted Therapy (RAT) has successfully been used in HRI research by including social robots in health-care interventions by virtue of their ability to engage human users both social and emotional dimensions. Research projects on this topic exist all over the globe in the USA, Europe, and Asia. All of these projects have the overall ambitious goal to increase the well-being of a vulnerable population. Typical work in RAT is performed using remote controlled robots; a technique called Wizard-of-Oz (WoZ). The robot is usually controlled, unbeknownst to the patient, by a human operator. However, WoZ has been demonstrated to not be a sustainable technique in the long-term. Providing the robots with autonomy (while remaining under the supervision of the therapist) has the potential to lighten the therapists burden, not only in the therapeutic session itself but also in longer-term diagnostic tasks. Therefore, there is a need for exploring several degrees of autonomy in social robots used in therapy. Increasing the autonomy of robots might also bring about a new set of challenges. In particular, there will be a need to answer new ethical questions regarding the use of robots with a vulnerable population, as well as a need to ensure ethically-compliant robot behaviours. Therefore, in this workshop we want to gather findings and explore which degree of autonomy might help to improve health-care interventions and how we can overcome the ethical challenges inherent to it.