 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProceedings of the SREC Workshop at HRI 2019
Sep 05, 2019Robot-Assisted Therapy (RAT) has successfully been used in Human Robot Interaction (HRI) research by including social robots in health-care interventions by virtue of their ability to engage human users in both social and emotional dimensions. Robots used for these tasks must be designed with several user groups in mind, including both individuals receiving therapy and care professionals responsible for the treatment. These robots must also be able to perceive their context of use, recognize human actions and intentions, and follow the therapeutic goals to perform meaningful and personalized treatment. Effective interactions require for robots to be capable of coordinated, timely behavior in response to social cues. This means being able to estimate and predict levels of engagement, attention, intentionality and emotional state during human-robot interactions. An additional challenge for social robots in therapy and care is the wide range of needs and conditions the different users can have during their interventions, even if they may share the same pathologies their current requirements and the objectives of their therapies can varied extensively. Therefore, it becomes crucial for robots to adapt their behaviors and interaction scenario to the specific needs, preferences and requirements of the patients they interact with. This personalization should be considered in terms of the robot behavior and the intervention scenario and must reflect the needs, preferences and requirements of the user.
A platform-independent robot control architecture for multiple therapeutic scenarios
Jul 18, 2016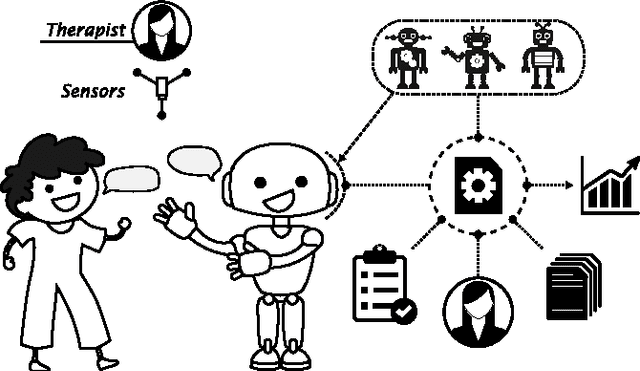
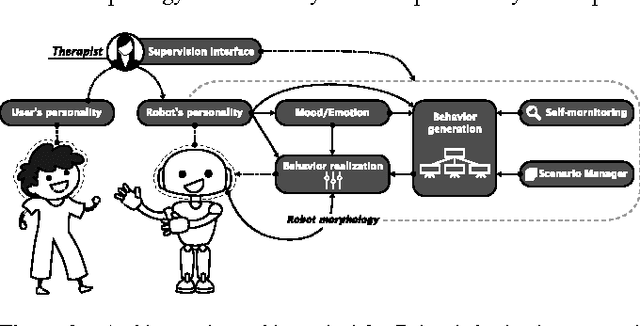
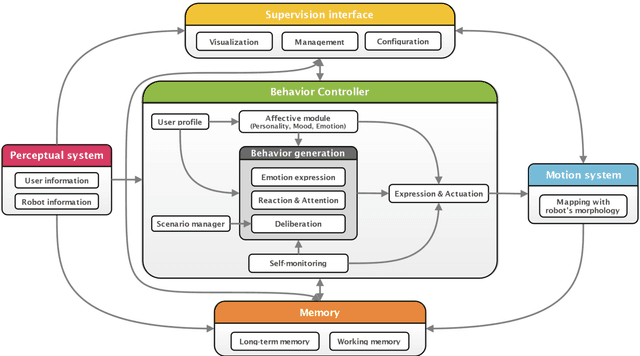
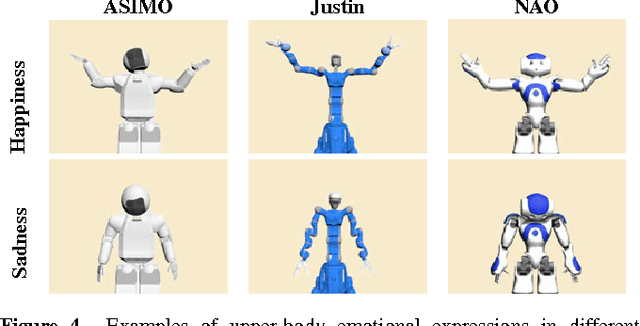
While social robots are developed to provide assistance to users through social interactions, their behaviors are dominantly pre-programmed and remote-controlled. Despite the numerous robot control architectures being developed, very few offer reutilization opportunities in various therapeutic contexts. To bridge this gap, we propose a robot control architecture to be applied in different scenarios taking into account requirements from both therapeutic and robotic perspectives. As robot behaviors are kept at an abstract level and afterward mapped with the robot's morphology, the proposed architecture accommodates its applicability to a variety of social robot platforms.