 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA platform-independent robot control architecture for multiple therapeutic scenarios
Jul 18, 2016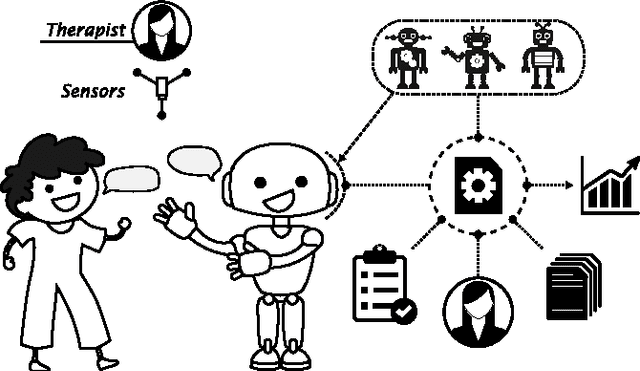
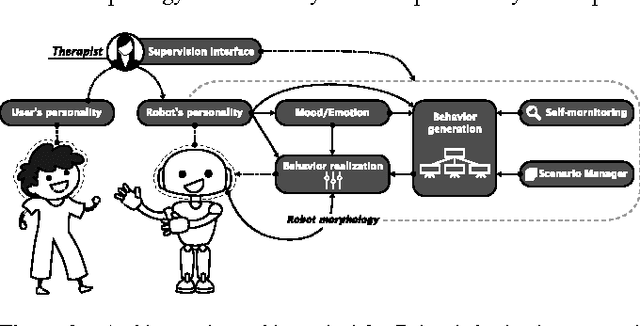
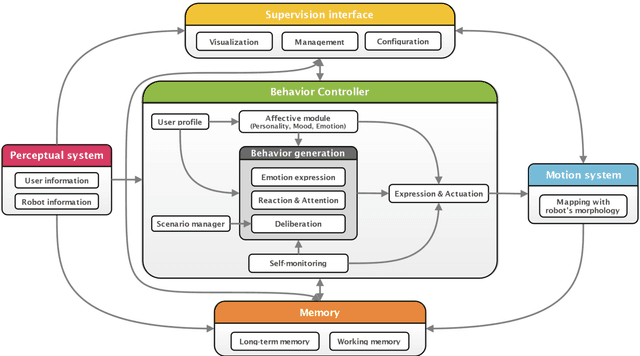
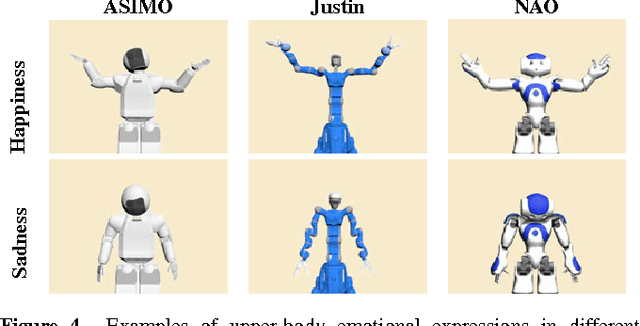
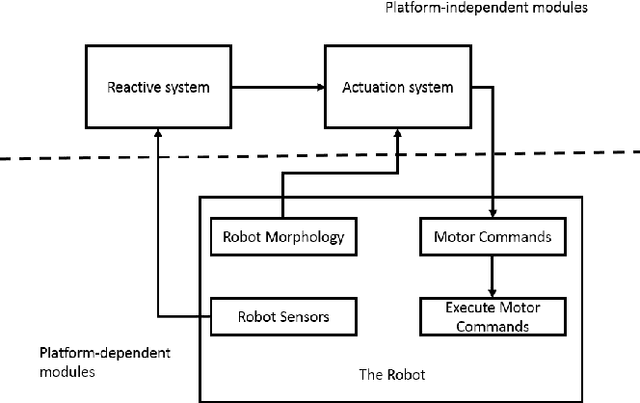
While social robots are developed to provide assistance to users through social interactions, their behaviors are dominantly pre-programmed and remote-controlled. Despite the numerous robot control architectures being developed, very few offer reutilization opportunities in various therapeutic contexts. To bridge this gap, we propose a robot control architecture to be applied in different scenarios taking into account requirements from both therapeutic and robotic perspectives. As robot behaviors are kept at an abstract level and afterward mapped with the robot's morphology, the proposed architecture accommodates its applicability to a variety of social robot platforms.
A multilayer reactive system for robots interacting with children with autism
Jun 13, 2016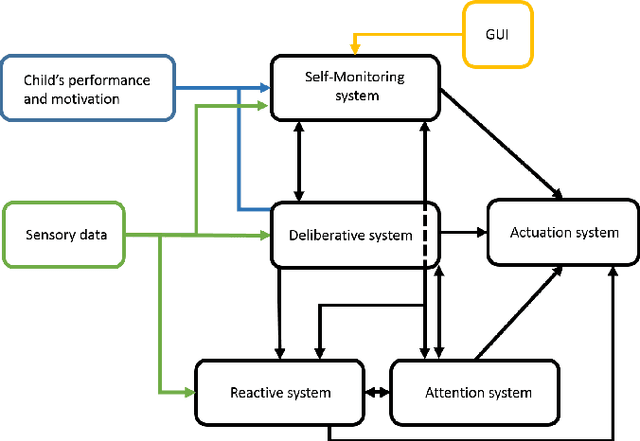
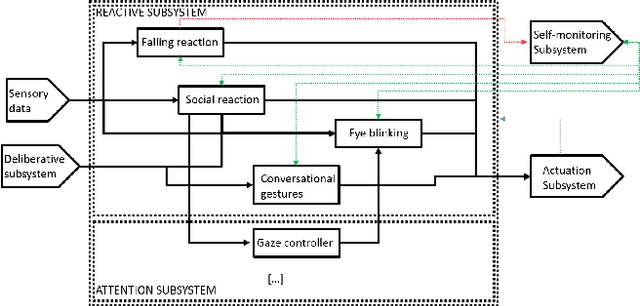
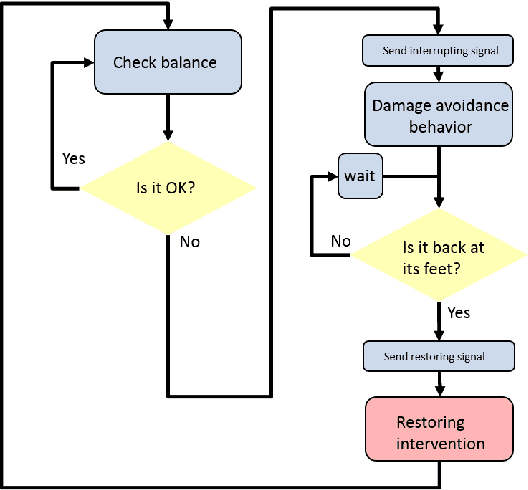
There is a lack of autonomy on traditional Robot-Assisted Therapy systems interacting with children with autism. To overcome this limitation a supervised autonomous robot controller is being built. In this paper we present a multilayer reactive system within such controller. The goal of this Reactive system is to allow the robot to appropriately react to the child's behavior creating the illusion of being alive.