 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAre you still with me? Continuous Engagement Assessment from a Robot's Point of View
Jan 13, 2020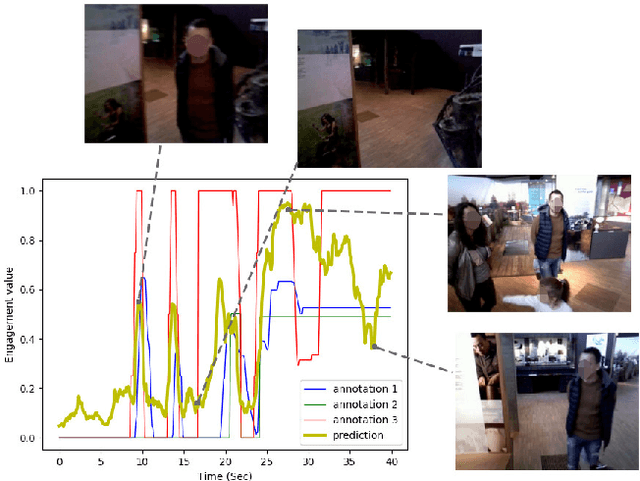
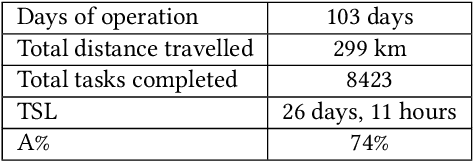
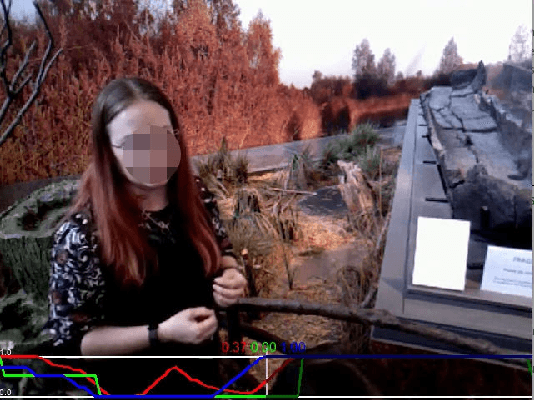
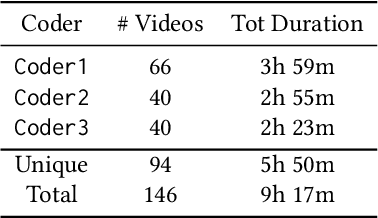
Continuously measuring the engagement of users with a robot in a Human-Robot Interaction (HRI) setting paves the way towards in-situ reinforcement learning, improve metrics of interaction quality, and can guide interaction design and behaviour optimisation. However, engagement is often considered very multi-faceted and difficult to capture in a workable and generic computational model that can serve as an overall measure of engagement. Building upon the intuitive ways humans successfully can assess situation for a degree of engagement when they see it, we propose a novel regression model (utilising CNN and LSTM networks) enabling robots to compute a single scalar engagement during interactions with humans from standard video streams, obtained from the point of view of an interacting robot. The model is based on a long-term dataset from an autonomous tour guide robot deployed in a public museum, with continuous annotation of a numeric engagement assessment by three independent coders. We show that this model not only can predict engagement very well in our own application domain but show its successful transfer to an entirely different dataset (with different tasks, environment, camera, robot and people). The trained model and the software is available to the HRI community as a tool to measure engagement in a variety of settings.
Proceedings of the Workshop on Social Robots in Therapy: Focusing on Autonomy and Ethical Challenges
Dec 18, 2018
Robot-Assisted Therapy (RAT) has successfully been used in HRI research by including social robots in health-care interventions by virtue of their ability to engage human users both social and emotional dimensions. Research projects on this topic exist all over the globe in the USA, Europe, and Asia. All of these projects have the overall ambitious goal to increase the well-being of a vulnerable population. Typical work in RAT is performed using remote controlled robots; a technique called Wizard-of-Oz (WoZ). The robot is usually controlled, unbeknownst to the patient, by a human operator. However, WoZ has been demonstrated to not be a sustainable technique in the long-term. Providing the robots with autonomy (while remaining under the supervision of the therapist) has the potential to lighten the therapists burden, not only in the therapeutic session itself but also in longer-term diagnostic tasks. Therefore, there is a need for exploring several degrees of autonomy in social robots used in therapy. Increasing the autonomy of robots might also bring about a new set of challenges. In particular, there will be a need to answer new ethical questions regarding the use of robots with a vulnerable population, as well as a need to ensure ethically-compliant robot behaviours. Therefore, in this workshop we want to gather findings and explore which degree of autonomy might help to improve health-care interventions and how we can overcome the ethical challenges inherent to it.
5th International Symposium on New Frontiers in Human-Robot Interaction 2016 (NF-HRI 2016)
Jun 08, 2016This volume is the proceedings of the 5th International Symposium on New Frontiers in Human-Robot Interaction, held at the AISB Convention 2016, which took place on the 5th and 6th of April 2016, in Sheffield, U.K. Organised by Maha Salem (Google U.K.), Astrid Weiss (Vienna University of Technology, Austria), Paul Baxter (Lincoln University, U.K.), and Kerstin Dautenhahn (University of Hertfordshire, U.K.).
Memory-Centred Cognitive Architectures for Robots Interacting Socially with Humans
Feb 18, 2016The Memory-Centred Cognition perspective places an active association substrate at the heart of cognition, rather than as a passive adjunct. Consequently, it places prediction and priming on the basis of prior experience to be inherent and fundamental aspects of processing. Social interaction is taken here to minimally require contingent and co-adaptive behaviours from the interacting parties. In this contribution, I seek to show how the memory-centred cognition approach to cognitive architectures can provide an means of addressing these functions. A number of example implementations are briefly reviewed, particularly focusing on multi-modal alignment as a function of experience-based priming. While there is further refinement required to the theory, and implementations based thereon, this approach provides an interesting alternative perspective on the foundations of cognitive architectures to support robots engage in social interactions with humans.
2nd Workshop on Cognitive Architectures for Social Human-Robot Interaction 2016 (CogArch4sHRI 2016)
Feb 04, 2016This volume is the proceedings of the 2nd workshop on Cognitive Architectures for Social Human-Robot Interaction, held at the ACM/IEEE HRI 2016 conference, which took place on Monday 7th March 2016, in Christchurch, New Zealand. Organised by Paul Baxter (Plymouth University, U.K.), J. Gregory Trafton (Naval Research Laboratory, USA), and Severin Lemaignan (Plymouth University, U.K.).