 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAre you still with me? Continuous Engagement Assessment from a Robot's Point of View
Paper and Code
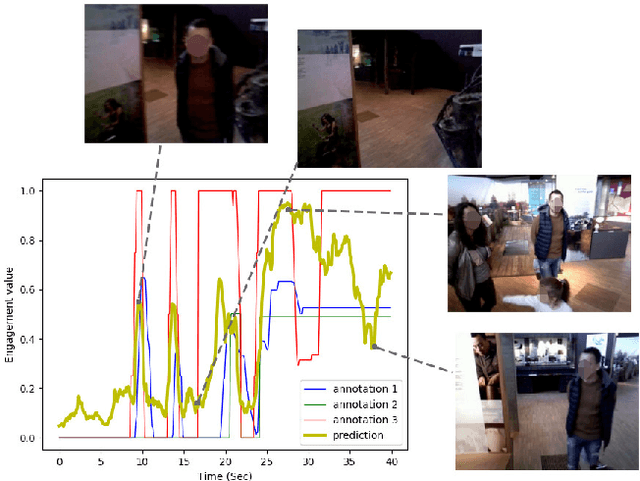
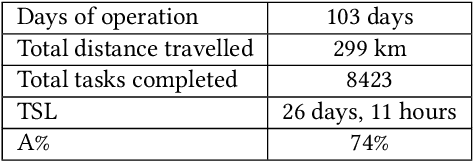
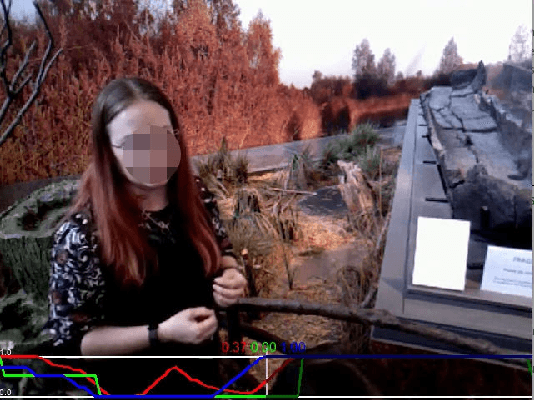
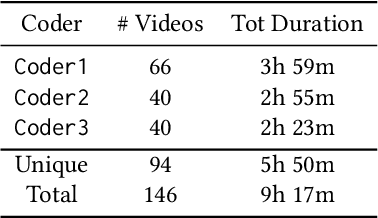
Continuously measuring the engagement of users with a robot in a Human-Robot Interaction (HRI) setting paves the way towards in-situ reinforcement learning, improve metrics of interaction quality, and can guide interaction design and behaviour optimisation. However, engagement is often considered very multi-faceted and difficult to capture in a workable and generic computational model that can serve as an overall measure of engagement. Building upon the intuitive ways humans successfully can assess situation for a degree of engagement when they see it, we propose a novel regression model (utilising CNN and LSTM networks) enabling robots to compute a single scalar engagement during interactions with humans from standard video streams, obtained from the point of view of an interacting robot. The model is based on a long-term dataset from an autonomous tour guide robot deployed in a public museum, with continuous annotation of a numeric engagement assessment by three independent coders. We show that this model not only can predict engagement very well in our own application domain but show its successful transfer to an entirely different dataset (with different tasks, environment, camera, robot and people). The trained model and the software is available to the HRI community as a tool to measure engagement in a variety of settings.