 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning on the Job: Long-Term Behavioural Adaptation in Human-Robot Interactions
Mar 20, 2022

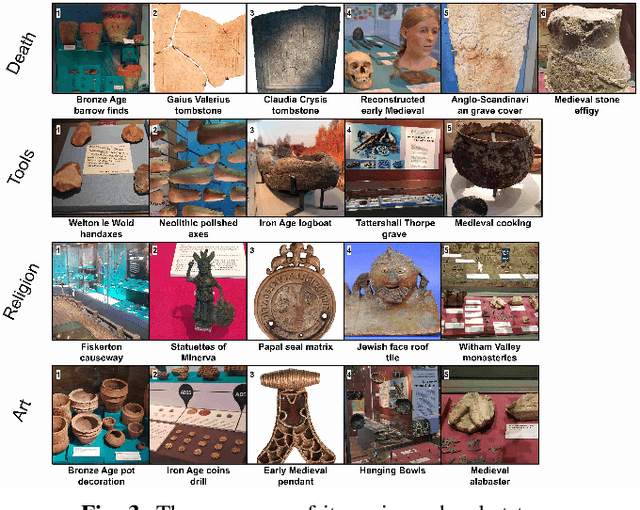
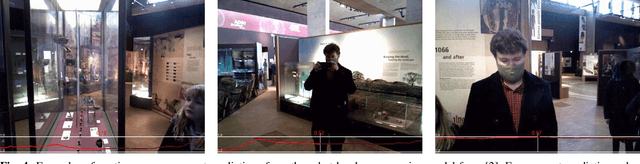
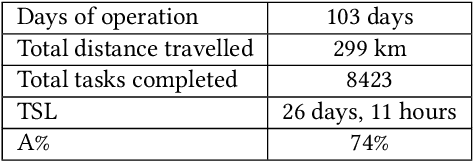
In this work, we propose a framework for allowing autonomous robots deployed for extended periods of time in public spaces to adapt their own behaviour online from user interactions. The robot behaviour planning is embedded in a Reinforcement Learning (RL) framework, where the objective is maximising the level of overall user engagement during the interactions. We use the Upper-Confidence-Bound Value-Iteration (UCBVI) algorithm, which gives a helpful way of managing the exploration-exploitation trade-off for real-time interactions. An engagement model trained end-to-end generates the reward function in real-time during policy execution. We test this approach in a public museum in Lincoln (UK), where the robot is deployed as a tour guide for the visitors. Results show that after a couple of months of exploration, the robot policy learned to maintain the engagement of users for longer, with an increase of 22.8% over the initial static policy in the number of items visited during the tour and a 30% increase in the probability of completing the tour. This work is a promising step toward behavioural adaptation in long-term scenarios for robotics applications in social settings.
Navigate-and-Seek: a Robotics Framework for People Localization in Agricultural Environments
Jul 08, 2021
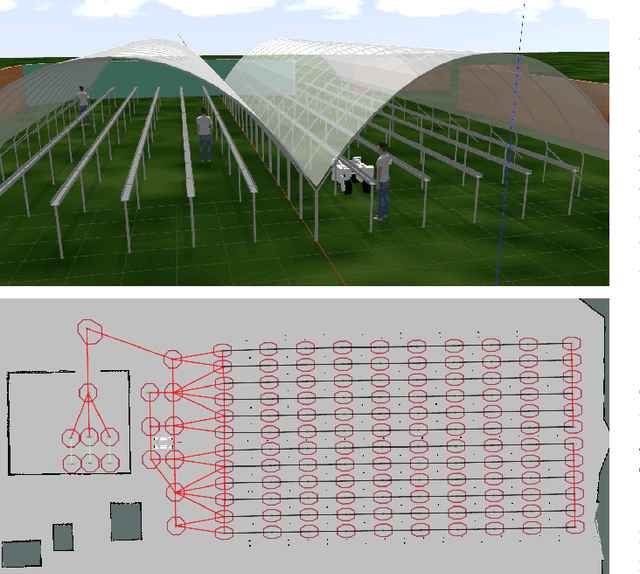

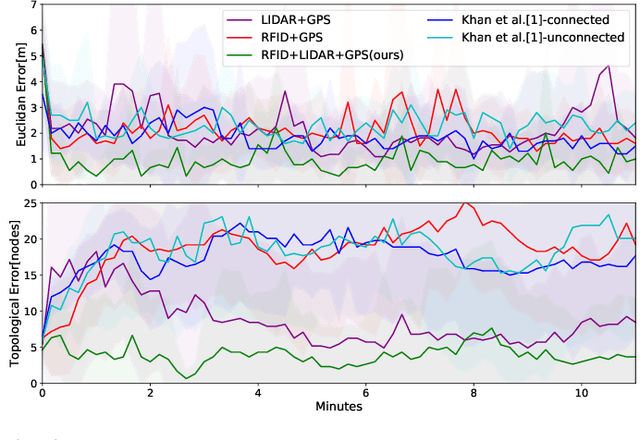
The agricultural domain offers a working environment where many human laborers are nowadays employed to maintain or harvest crops, with huge potential for productivity gains through the introduction of robotic automation. Detecting and localizing humans reliably and accurately in such an environment, however, is a prerequisite to many services offered by fleets of mobile robots collaborating with human workers. Consequently, in this paper, we expand on the concept of a topological particle filter (TPF) to accurately and individually localize and track workers in a farm environment, integrating information from heterogeneous sensors and combining local active sensing (exploiting a robot's onboard sensing employing a Next-Best-Sense planning approach) and global localization (using affordable IoT GNSS devices). We validate the proposed approach in topologies created for the deployment of robotics fleets to support fruit pickers in a real farm environment. By combining multi-sensor observations on the topological level complemented by active perception through the NBS approach, we show that we can improve the accuracy of picker localization in comparison to prior work.
Are you still with me? Continuous Engagement Assessment from a Robot's Point of View
Jan 13, 2020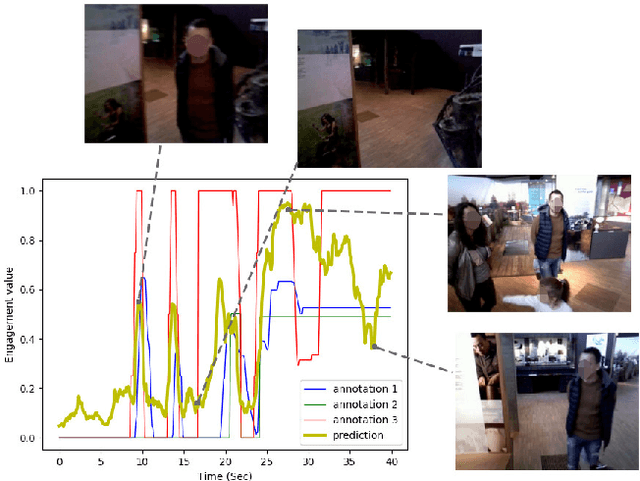
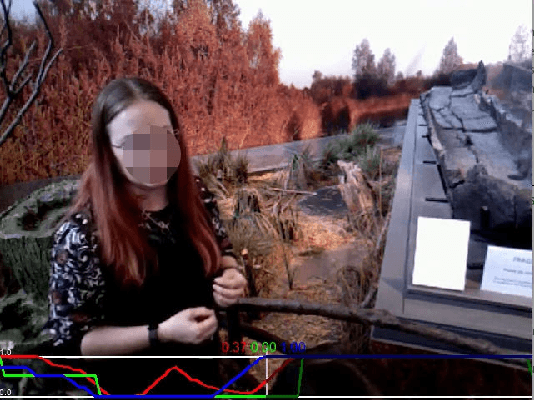
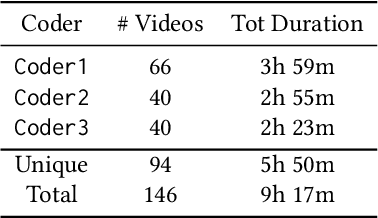
Continuously measuring the engagement of users with a robot in a Human-Robot Interaction (HRI) setting paves the way towards in-situ reinforcement learning, improve metrics of interaction quality, and can guide interaction design and behaviour optimisation. However, engagement is often considered very multi-faceted and difficult to capture in a workable and generic computational model that can serve as an overall measure of engagement. Building upon the intuitive ways humans successfully can assess situation for a degree of engagement when they see it, we propose a novel regression model (utilising CNN and LSTM networks) enabling robots to compute a single scalar engagement during interactions with humans from standard video streams, obtained from the point of view of an interacting robot. The model is based on a long-term dataset from an autonomous tour guide robot deployed in a public museum, with continuous annotation of a numeric engagement assessment by three independent coders. We show that this model not only can predict engagement very well in our own application domain but show its successful transfer to an entirely different dataset (with different tasks, environment, camera, robot and people). The trained model and the software is available to the HRI community as a tool to measure engagement in a variety of settings.
Machine Learning for RealisticBall Detection in RoboCup SPL
Jul 12, 2017

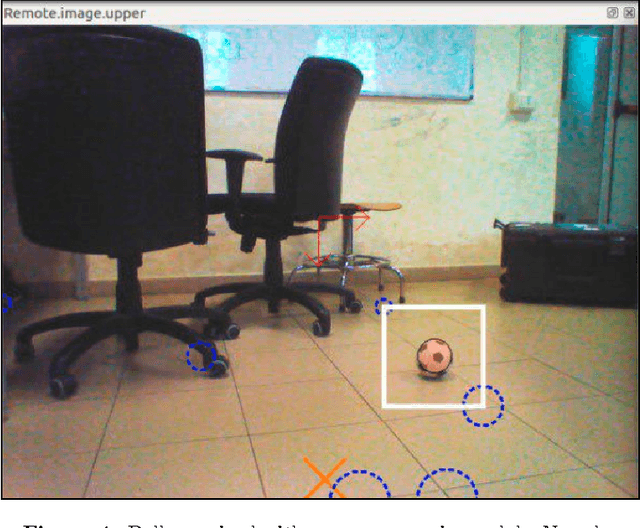
In this technical report, we describe the use of a machine learning approach for detecting the realistic black and white ball currently in use in the RoboCup Standard Platform League. Our aim is to provide a ready-to-use software module that can be useful for the RoboCup SPL community. To this end, the approach is integrated within the official B-Human code release 2016. The complete code for the approach presented in this work can be downloaded from the SPQR Team homepage at http://spqr.diag.uniroma1.it and from the SPQR Team GitHub repository at https://github.com/SPQRTeam/SPQRBallPerceptor. The approach has been tested in multiple environments, both indoor and outdoor. Furthermore, the ball detector described in this technical report has been used by the SPQR Robot Soccer Team during the competitions of the Robocup German Open 2017. To facilitate the use of our code by other teams, we have prepared a step-by-step installation guide.