 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMachine Learning for RealisticBall Detection in RoboCup SPL
Jul 12, 2017

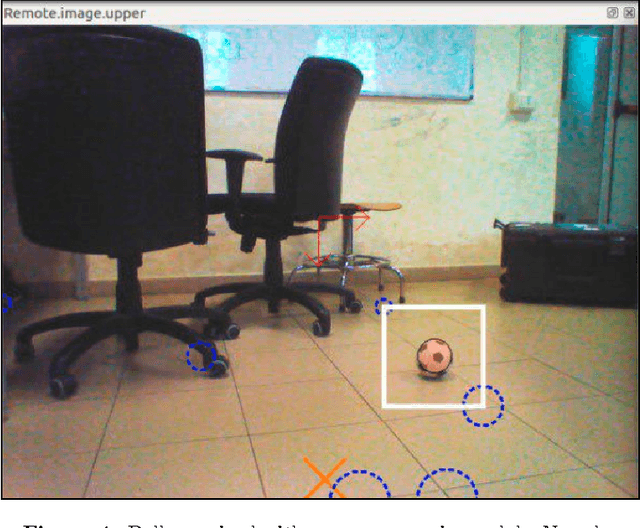
In this technical report, we describe the use of a machine learning approach for detecting the realistic black and white ball currently in use in the RoboCup Standard Platform League. Our aim is to provide a ready-to-use software module that can be useful for the RoboCup SPL community. To this end, the approach is integrated within the official B-Human code release 2016. The complete code for the approach presented in this work can be downloaded from the SPQR Team homepage at http://spqr.diag.uniroma1.it and from the SPQR Team GitHub repository at https://github.com/SPQRTeam/SPQRBallPerceptor. The approach has been tested in multiple environments, both indoor and outdoor. Furthermore, the ball detector described in this technical report has been used by the SPQR Robot Soccer Team during the competitions of the Robocup German Open 2017. To facilitate the use of our code by other teams, we have prepared a step-by-step installation guide.