 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUser Experience of a Smart Factory Robot: Assembly Line Workers Demand Adaptive Robots
Jun 13, 2016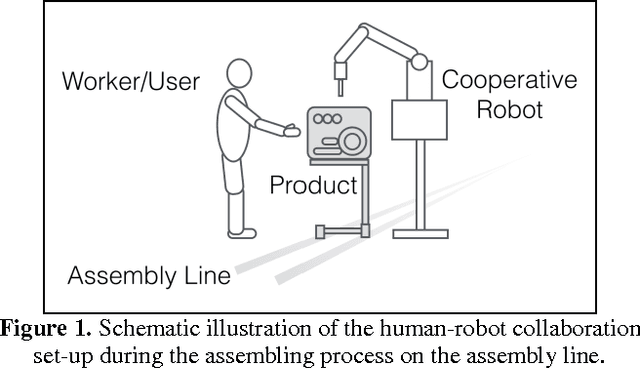

This paper reports a case study on the User Experience (UX)of an industrial robotic prototype in the context of human-robot cooperation in an automotive assembly line. The goal was to find out what kinds of suggestions the assembly line workers, who actually use the new robotic system, propose in order to improve the human-robot interaction (HRI). The operators working with the robotic prototype were interviewed three weeks after the deployment using established UX narrative interview guidelines. Our results show that the cooperation with a robot that executes predefined working steps actually impedes the user in terms of flexibility and individual speed. This results in a change of working routine for the operators, impacts the UX, and potentially leads to a decrease in productivity. We present the results of the interviews as well as first thoughts on technical solutions in order to enhance the adaptivity and subsequently the UX of the human-robot cooperation.
Help, Anyone? A User Study For Modeling Robotic Behavior To Mitigate Malfunctions With The Help Of The User
Jun 08, 2016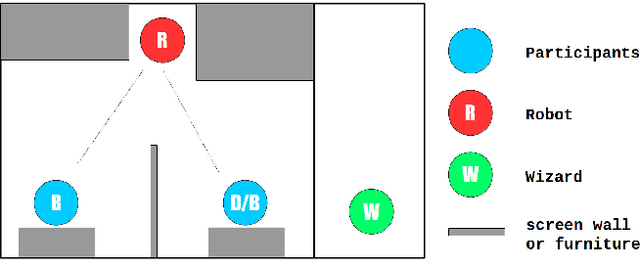
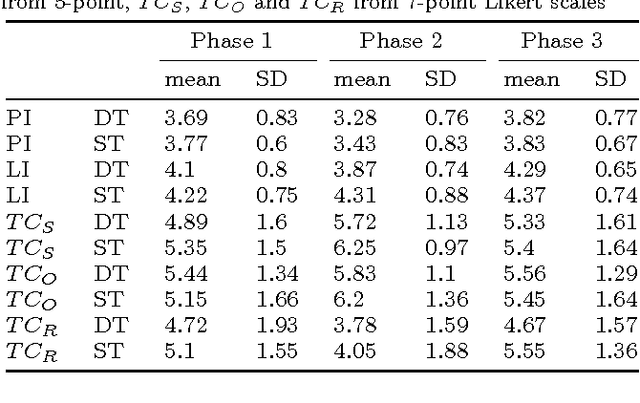

Service robots for the domestic environment are intended to autonomously provide support for their users. However, state-of-the-art robots still often get stuck in failure situations leading to breakdowns in the interaction flow from which the robot cannot recover alone. We performed a multi-user Wizard-of-Oz experiment in which we manipulated the robot's behavior in such a way that it appeared unexpected and malfunctioning, and asked participants to help the robot in order to restore the interaction flow. We examined how participants reacted to the robot's error, its subsequent request for help and how it changed their perception of the robot with respect to perceived intelligence, likability, and task contribution. As interaction scenario we used a game of building Lego models performed by user dyads. In total 38 participants interacted with the robot and helped in malfunctioning situations. We report two major findings: (1) in user dyads, the user who gave the last command followed by the user who is closer is more likely to help (2) malfunctions that can be actively fixed by the user seem not to negatively impact perceived intelligence and likability ratings. This work offers insights in how far user support can be a strategy for domestic service robots to recover from repeating malfunctions.
5th International Symposium on New Frontiers in Human-Robot Interaction 2016 (NF-HRI 2016)
Jun 08, 2016This volume is the proceedings of the 5th International Symposium on New Frontiers in Human-Robot Interaction, held at the AISB Convention 2016, which took place on the 5th and 6th of April 2016, in Sheffield, U.K. Organised by Maha Salem (Google U.K.), Astrid Weiss (Vienna University of Technology, Austria), Paul Baxter (Lincoln University, U.K.), and Kerstin Dautenhahn (University of Hertfordshire, U.K.).