 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUtilizing Bluetooth Low Energy to recognize proximity, touch and humans
Apr 06, 2019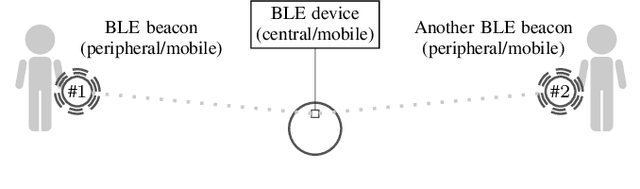
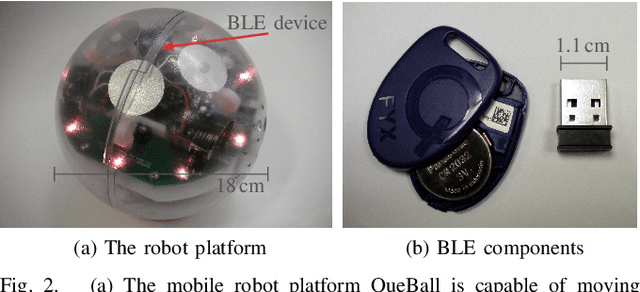
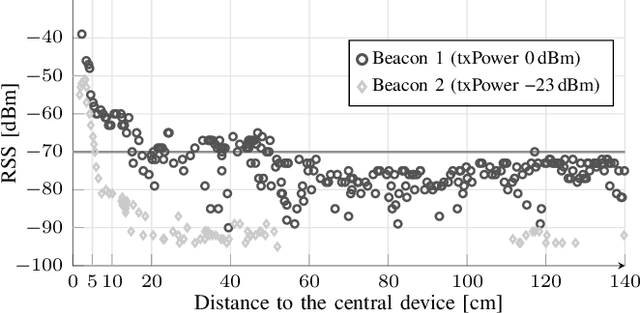
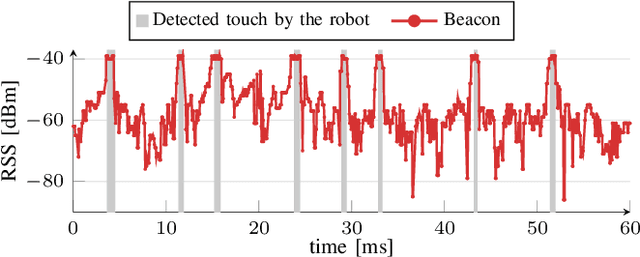
Interacting with humans is one of the main challenges for mobile robots in a human inhabited environment. To enable adaptive behavior, a robot needs to recognize touch gestures and/or the proximity to interacting individuals. Moreover, a robot interacting with two or more humans usually needs to distinguish between them. However, this remains both a configuration and cost intensive task. In this paper we utilize inexpensive Bluetooth Low Energy (BLE) devices and propose an easy and configurable technique to enhance the robot's capabilities to interact with surrounding people. In a noisy laboratory setting, a mobile spherical robot is utilized in three proof-of-concept experiments of the proposed system architecture. Firstly, we enhance the robot with proximity information about the individuals in the surrounding environment. Secondly, we exploit BLE to utilize it as a touch sensor. And lastly, we use BLE to distinguish between interacting individuals. Results show that observing the raw received signal strength (RSS) between BLE devices already enhances the robot's interaction capabilities and that the provided infrastructure can be facilitated to enable adaptive behavior in the future. We show one and the same sensor system can be used to detect different types of information relevant in human-robot interaction (HRI) experiments.
What Communication Modalities Do Users Prefer in Real Time HRI?
Jun 13, 2016

This paper investigates users' preferred interaction modalities when playing an imitation game with KASPAR, a small child-sized humanoid robot. The study involved 16 adult participants teaching the robot to mime a nursery rhyme via one of three interaction modalities in a real-time Human-Robot Interaction (HRI) experiment: voice, guiding touch and visual demonstration. The findings suggest that the users appeared to have no preference in terms of human effort for completing the task. However, there was a significant difference in human enjoyment preferences of input modality and a marginal difference in the robot's perceived ability to imitate.
5th International Symposium on New Frontiers in Human-Robot Interaction 2016 (NF-HRI 2016)
Jun 08, 2016This volume is the proceedings of the 5th International Symposium on New Frontiers in Human-Robot Interaction, held at the AISB Convention 2016, which took place on the 5th and 6th of April 2016, in Sheffield, U.K. Organised by Maha Salem (Google U.K.), Astrid Weiss (Vienna University of Technology, Austria), Paul Baxter (Lincoln University, U.K.), and Kerstin Dautenhahn (University of Hertfordshire, U.K.).