 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobots Learning to Say `No': Prohibition and Rejective Mechanisms in Acquisition of Linguistic Negation
Oct 28, 2018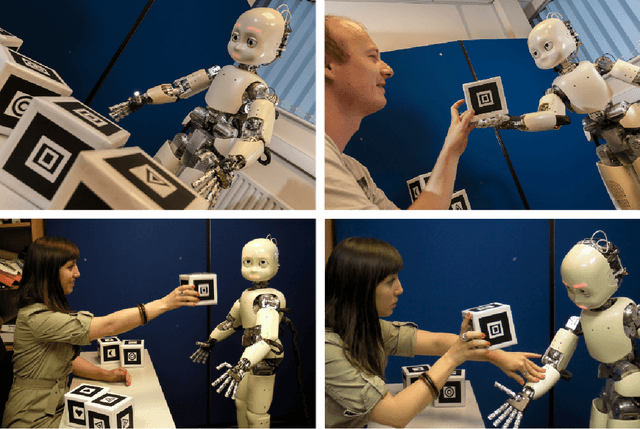
`No' belongs to the first ten words used by children and embodies the first active form of linguistic negation. Despite its early occurrence the details of its acquisition process remain largely unknown. The circumstance that `no' cannot be construed as a label for perceptible objects or events puts it outside of the scope of most modern accounts of language acquisition. Moreover, most symbol grounding architectures will struggle to ground the word due to its non-referential character. In an experimental study involving the child-like humanoid robot iCub that was designed to illuminate the acquisition process of negation words, the robot is deployed in several rounds of speech-wise unconstrained interaction with na\"ive participants acting as its language teachers. The results corroborate the hypothesis that affect or volition plays a pivotal role in the socially distributed acquisition process. Negation words are prosodically salient within prohibitive utterances and negative intent interpretations such that they can be easily isolated from the teacher's speech signal. These words subsequently may be grounded in negative affective states. However, observations of the nature of prohibitive acts and the temporal relationships between its linguistic and extra-linguistic components raise serious questions over the suitability of Hebbian-type algorithms for language grounding.
What Communication Modalities Do Users Prefer in Real Time HRI?
Jun 13, 2016

This paper investigates users' preferred interaction modalities when playing an imitation game with KASPAR, a small child-sized humanoid robot. The study involved 16 adult participants teaching the robot to mime a nursery rhyme via one of three interaction modalities in a real-time Human-Robot Interaction (HRI) experiment: voice, guiding touch and visual demonstration. The findings suggest that the users appeared to have no preference in terms of human effort for completing the task. However, there was a significant difference in human enjoyment preferences of input modality and a marginal difference in the robot's perceived ability to imitate.