 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWarmth and Competence to Predict Human Preference of Robot Behavior in Physical Human-Robot Interaction
Aug 13, 2020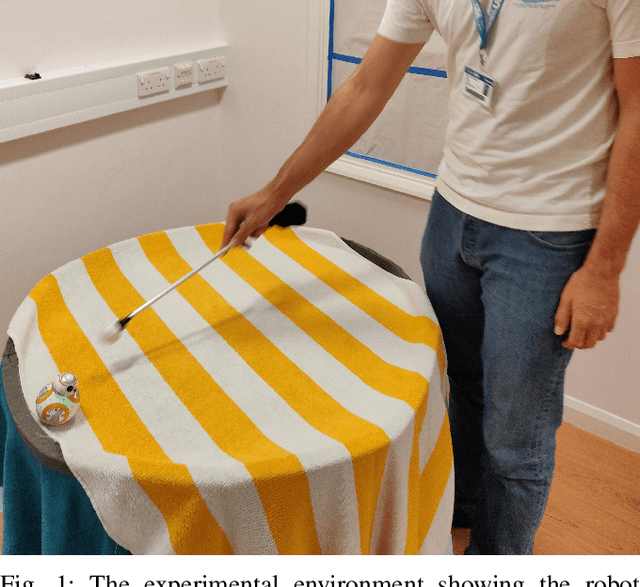
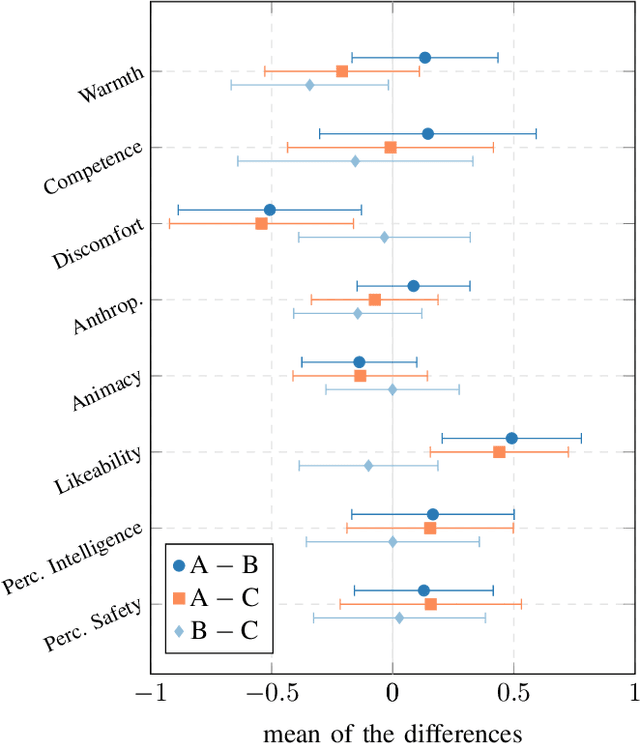

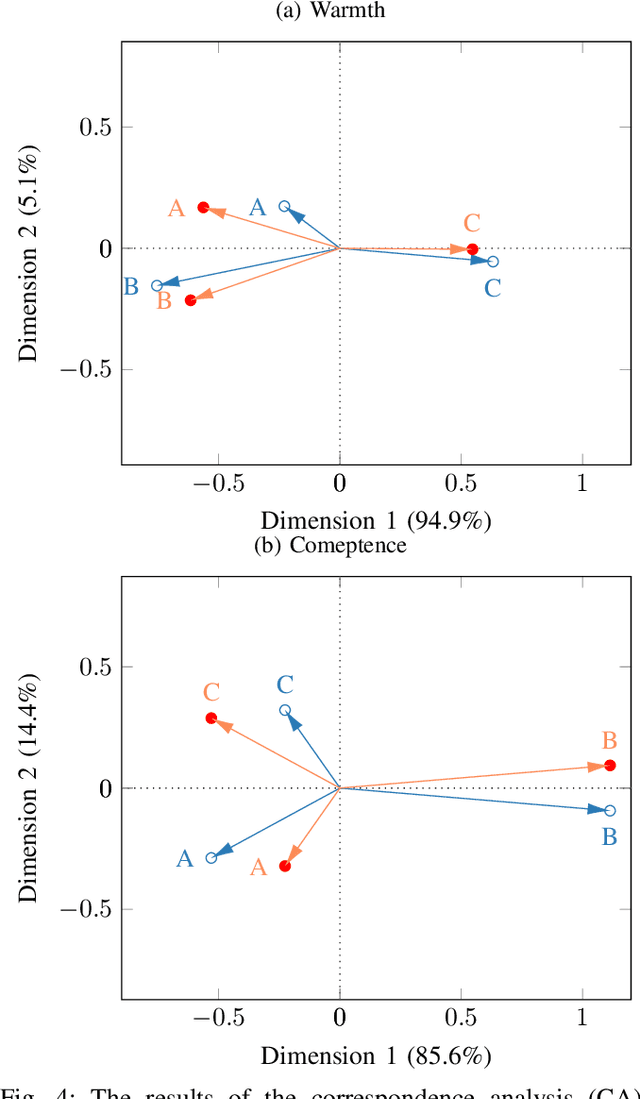
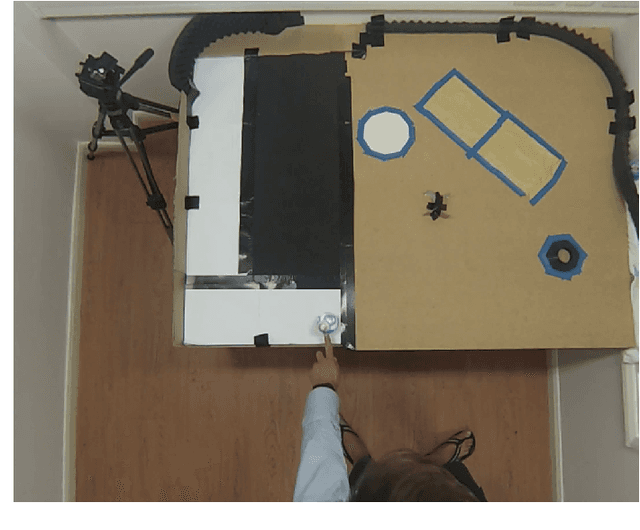
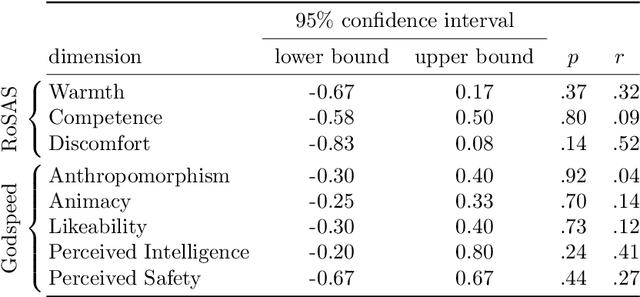
A solid methodology to understand human perception and preferences in human-robot interaction (HRI) is crucial in designing real-world HRI. Social cognition posits that the dimensions Warmth and Competence are central and universal dimensions characterizing other humans. The Robotic Social Attribute Scale (RoSAS) proposes items for those dimensions suitable for HRI and validated them in a visual observation study. In this paper we complement the validation by showing the usability of these dimensions in a behavior based, physical HRI study with a fully autonomous robot. We compare the findings with the popular Godspeed dimensions Animacy, Anthropomorphism, Likeability, Perceived Intelligence and Perceived Safety. We found that Warmth and Competence, among all RoSAS and Godspeed dimensions, are the most important predictors for human preferences between different robot behaviors. This predictive power holds even when there is no clear consensus preference or significant factor difference between conditions.
Human Perception of Intrinsically Motivated Autonomy in Human-Robot Interaction
Feb 14, 2020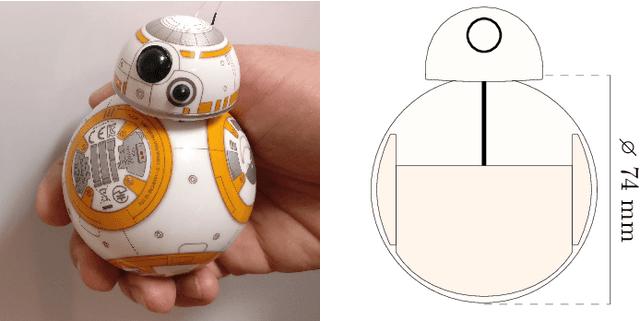
A challenge in using fully autonomous robots in human-robot interaction (HRI) is to design behavior that is engaging enough to encourage voluntary, long-term interaction, yet robust to the perturbations induced by human interaction. Here we evaluate if an intrinsically motivated, physical robot can address this challenge. We use predictive information maximization as an intrinsic motivation, as simulated experiments showed that this leads to playful, exploratory behavior that is robust to changes in the robot's morphology and environment. To the authors' knowledge there are no previous HRI studies that evaluate the effect of intrinsically motivated behavior in robots on the human perception of those robots. We present a game-like study design, which allows us to focus on the interplay between the robot and the human participant. In contrast to a study design where participants order or control a robot to do a specific task, the robot and the human participants in our study design explore their behaviors without knowledge about any specific goals. We conducted a within-subjects study (N=24) were participants interacted with a fully autonomous Sphero BB8 robot with different behavioral regimes: one realizing an adaptive, intrinsically motivated behavior and the other being reactive, but not adaptive. A quantitative analysis of post-interaction questionnaires showed a significantly higher perception (r=.555, p=.007) of the dimension "Warmth" compared to the baseline behavior. Warmth is considered a primary dimension for social attitude formation in human cognition. A human perceived as warm (i.e. friendly and trustworthy) experiences more positive social interactions. If future work demonstrates that this transfers to human-robot social cognition, then the generic methods presented here could be used to imbue robots with behavior leading to positive perception by humans.
ROS 2 for RoboCup
Jun 29, 2019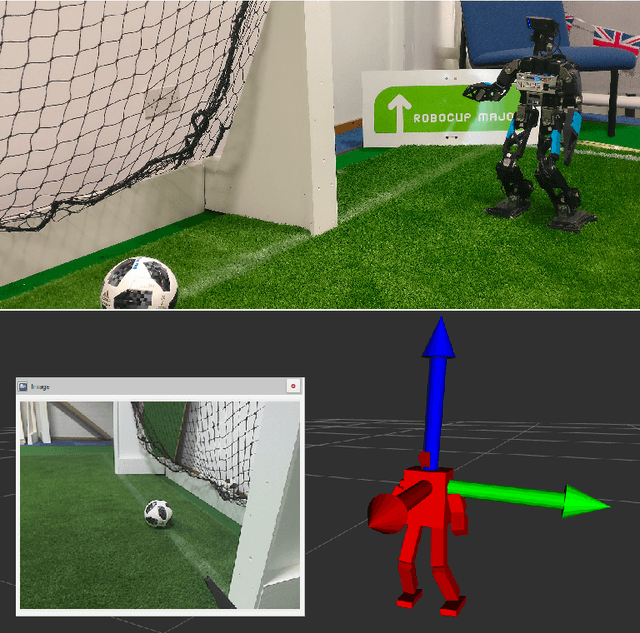
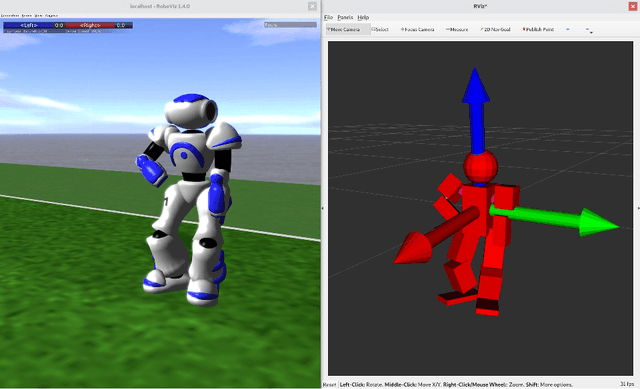
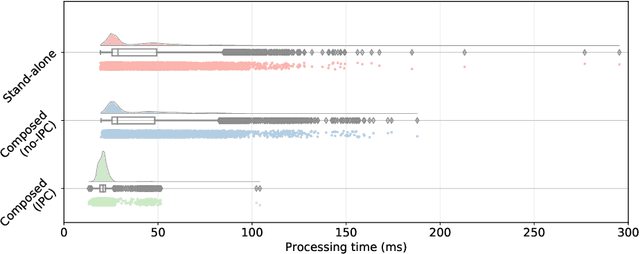
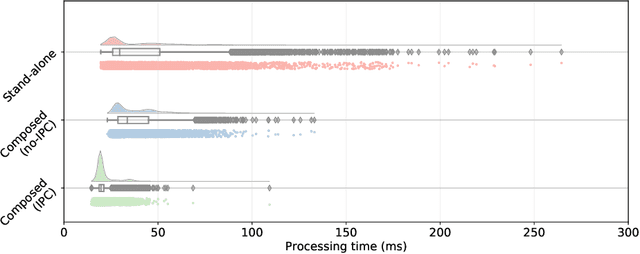
There has always been much motivation for sharing code and solutions among teams in the RoboCup community. Yet the transfer of code between teams was usually complicated due to a huge variety of used frameworks and their differences in processing sensory information. The RoboCup@Home league has tackled this by transitioning to ROS as a common framework. In contrast, other leagues, such as those using humanoid robots, are reluctant to use ROS, as in those leagues real-time processing and low-computational complexity is crucial. However, ROS 2 now offers built-in support for real-time processing and promises to be suitable for embedded systems and multi-robot systems. It also offers the possibility to compose a set of nodes needed to run a robot into a single process. This, as we will show, reduces communication overhead and allows to have one single binary, which is pertinent to competitions such as the 3D-Simulation League. Although ROS 2 has not yet been announced to be production ready, we started the process to develop ROS 2 packages for using it with humanoid robots (real and simulated). This paper presents the developed modules, our contributions to ROS 2 core and RoboCup related packages, and most importantly it provides benchmarks that indicate that ROS 2 is a promising candidate for a common framework used among leagues.
Intrinsically Motivated Autonomy in Human-Robot Interaction: Human Perception of Predictive Information in Robots
May 05, 2019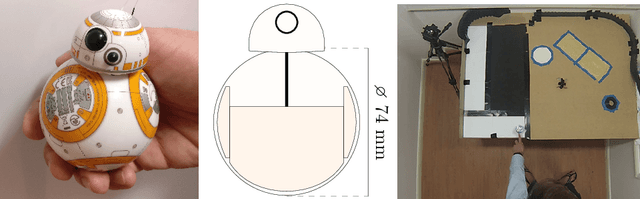

In this paper we present a fully autonomous and intrinsically motivated robot usable for HRI experiments. We argue that an intrinsically motivated approach based on the Predictive Information formalism, like the one presented here, could provide us with a pathway towards autonomous robot behaviour generation, that is capable of producing behaviour interesting enough for sustaining the interaction with humans and without the need for a human operator in the loop. We present a possible reactive baseline behaviour for comparison for future research. Participants perceive the baseline and the adaptive, intrinsically motivated behaviour differently. In our exploratory study we see evidence that participants perceive an intrinsically motivated robot as less intelligent than the reactive baseline behaviour. We argue that is mostly due to the high adaptation rate chosen and the design of the environment. However, we also see that the adaptive robot is perceived as more warm, a factor which carries more weight in interpersonal interaction than competence.
Bold Hearts Team Description for RoboCup 2019
Apr 22, 2019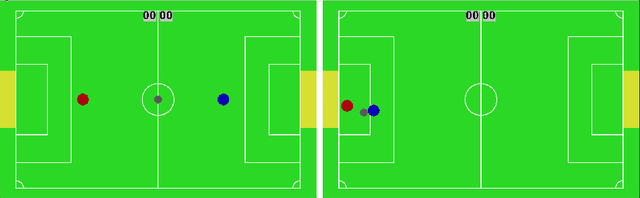
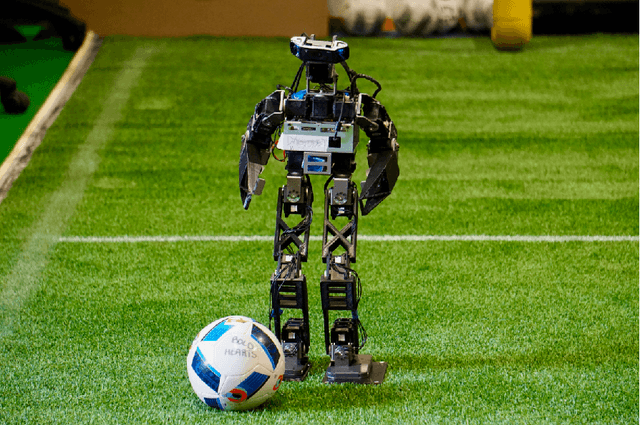

We participated in the RoboCup 2018 competition in Montreal with our newly developed BoldBot based on the Darwin-OP and mostly self-printed custom parts. This paper is about the lessons learnt from that competition and further developments for the RoboCup 2019 competition. Firstly, we briefly introduce the team along with an overview of past achievements. We then present a simple, standalone 2D simulator we use for simplifying the entry for new members with making basic RoboCup concepts quickly accessible. We describe our approach for semantic-segmentation for our vision used in the 2018 competition, which replaced the lookup-table (LUT) implementation we had before. We also discuss the extra structural support we plan to add to the printed parts of the BoldBot and our transition to ROS 2 as our new middleware. Lastly, we will present a collection of open-source contributions of our team.
Utilizing Bluetooth Low Energy to recognize proximity, touch and humans
Apr 06, 2019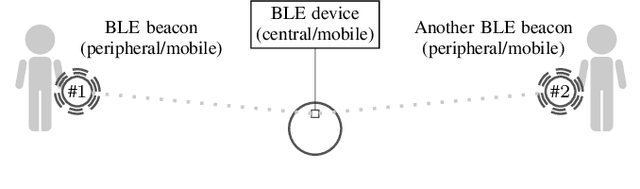
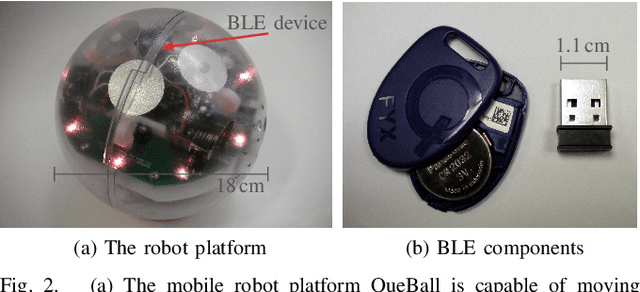
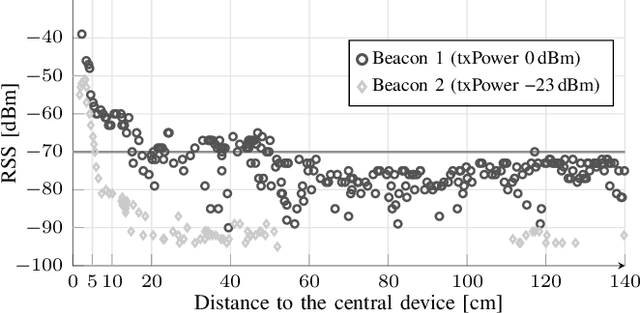
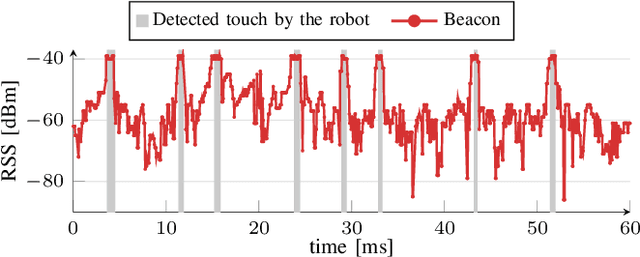
Interacting with humans is one of the main challenges for mobile robots in a human inhabited environment. To enable adaptive behavior, a robot needs to recognize touch gestures and/or the proximity to interacting individuals. Moreover, a robot interacting with two or more humans usually needs to distinguish between them. However, this remains both a configuration and cost intensive task. In this paper we utilize inexpensive Bluetooth Low Energy (BLE) devices and propose an easy and configurable technique to enhance the robot's capabilities to interact with surrounding people. In a noisy laboratory setting, a mobile spherical robot is utilized in three proof-of-concept experiments of the proposed system architecture. Firstly, we enhance the robot with proximity information about the individuals in the surrounding environment. Secondly, we exploit BLE to utilize it as a touch sensor. And lastly, we use BLE to distinguish between interacting individuals. Results show that observing the raw received signal strength (RSS) between BLE devices already enhances the robot's interaction capabilities and that the provided infrastructure can be facilitated to enable adaptive behavior in the future. We show one and the same sensor system can be used to detect different types of information relevant in human-robot interaction (HRI) experiments.
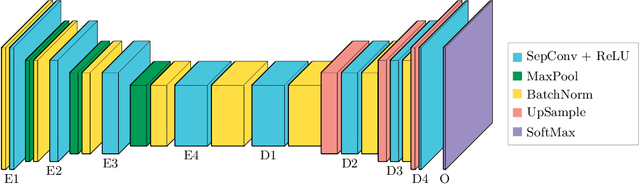
Deep Learning for Semantic Segmentation on Minimal Hardware
Jul 15, 2018
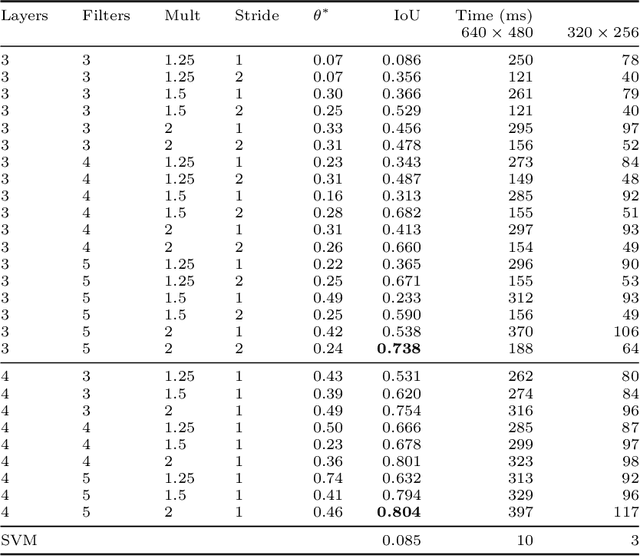
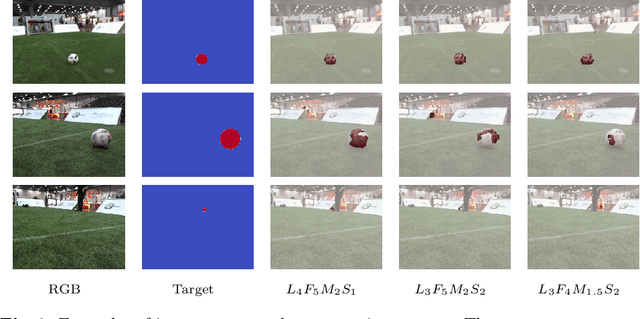

Deep learning has revolutionised many fields, but it is still challenging to transfer its success to small mobile robots with minimal hardware. Specifically, some work has been done to this effect in the RoboCup humanoid football domain, but results that are performant and efficient and still generally applicable outside of this domain are lacking. We propose an approach conceptually different from those taken previously. It is based on semantic segmentation and does achieve these desired properties. In detail, it is being able to process full VGA images in real-time on a low-power mobile processor. It can further handle multiple image dimensions without retraining, it does not require specific domain knowledge for achieving a high frame rate and it is applicable on a minimal mobile hardware.