 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Perception of Intrinsically Motivated Autonomy in Human-Robot Interaction
Paper and Code
Feb 14, 2020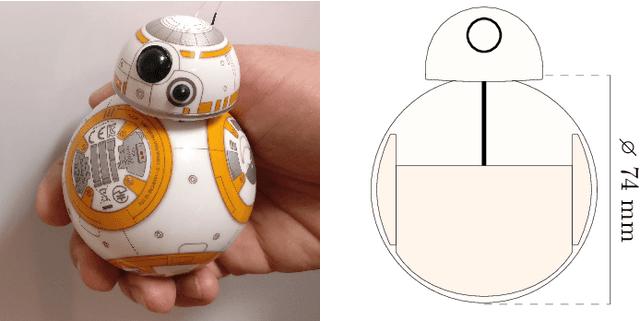
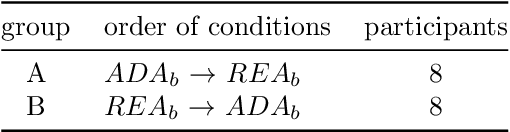
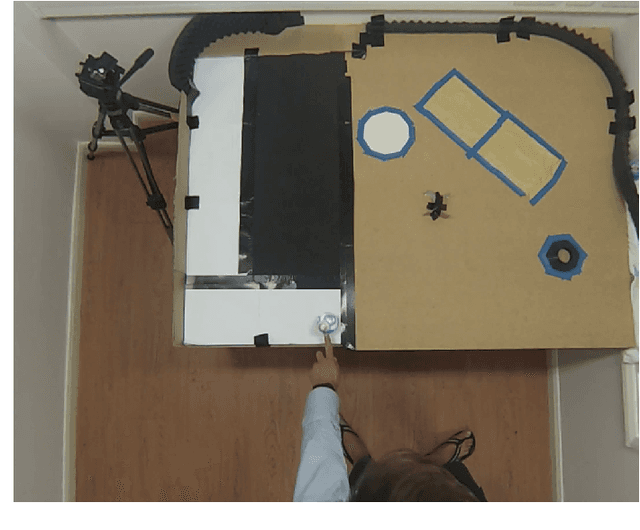
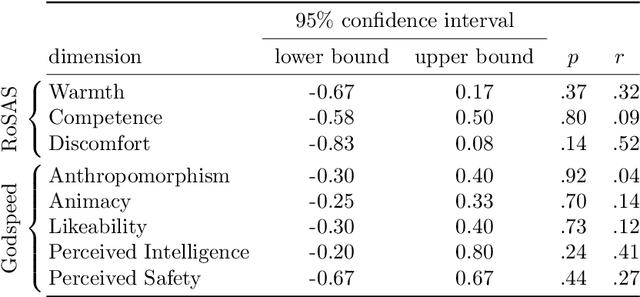
A challenge in using fully autonomous robots in human-robot interaction (HRI) is to design behavior that is engaging enough to encourage voluntary, long-term interaction, yet robust to the perturbations induced by human interaction. Here we evaluate if an intrinsically motivated, physical robot can address this challenge. We use predictive information maximization as an intrinsic motivation, as simulated experiments showed that this leads to playful, exploratory behavior that is robust to changes in the robot's morphology and environment. To the authors' knowledge there are no previous HRI studies that evaluate the effect of intrinsically motivated behavior in robots on the human perception of those robots. We present a game-like study design, which allows us to focus on the interplay between the robot and the human participant. In contrast to a study design where participants order or control a robot to do a specific task, the robot and the human participants in our study design explore their behaviors without knowledge about any specific goals. We conducted a within-subjects study (N=24) were participants interacted with a fully autonomous Sphero BB8 robot with different behavioral regimes: one realizing an adaptive, intrinsically motivated behavior and the other being reactive, but not adaptive. A quantitative analysis of post-interaction questionnaires showed a significantly higher perception (r=.555, p=.007) of the dimension "Warmth" compared to the baseline behavior. Warmth is considered a primary dimension for social attitude formation in human cognition. A human perceived as warm (i.e. friendly and trustworthy) experiences more positive social interactions. If future work demonstrates that this transfers to human-robot social cognition, then the generic methods presented here could be used to imbue robots with behavior leading to positive perception by humans.