 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntrinsically Motivated Autonomy in Human-Robot Interaction: Human Perception of Predictive Information in Robots
Paper and Code
May 05, 2019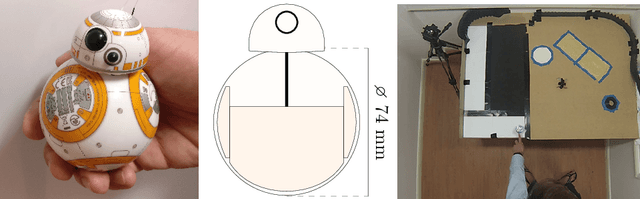

In this paper we present a fully autonomous and intrinsically motivated robot usable for HRI experiments. We argue that an intrinsically motivated approach based on the Predictive Information formalism, like the one presented here, could provide us with a pathway towards autonomous robot behaviour generation, that is capable of producing behaviour interesting enough for sustaining the interaction with humans and without the need for a human operator in the loop. We present a possible reactive baseline behaviour for comparison for future research. Participants perceive the baseline and the adaptive, intrinsically motivated behaviour differently. In our exploratory study we see evidence that participants perceive an intrinsically motivated robot as less intelligent than the reactive baseline behaviour. We argue that is mostly due to the high adaptation rate chosen and the design of the environment. However, we also see that the adaptive robot is perceived as more warm, a factor which carries more weight in interpersonal interaction than competence.