 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocially Pertinent Robots in Gerontological Healthcare
Apr 11, 2024
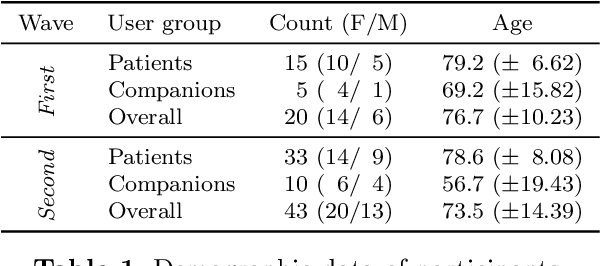
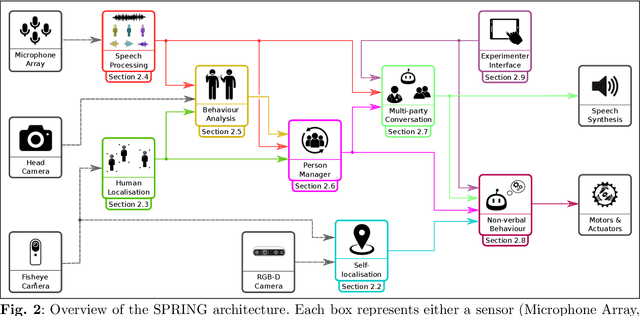
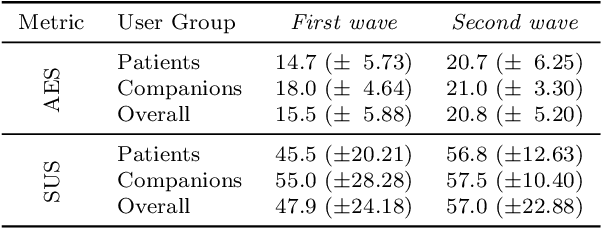
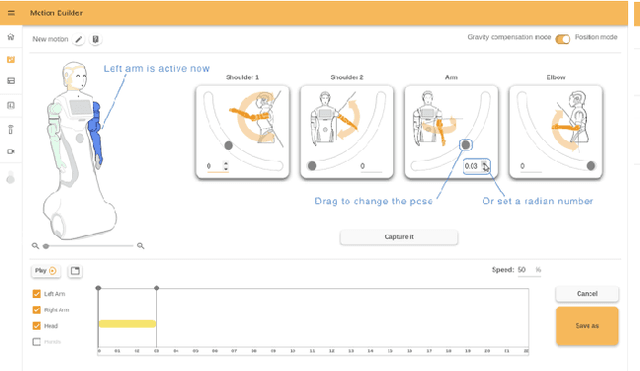
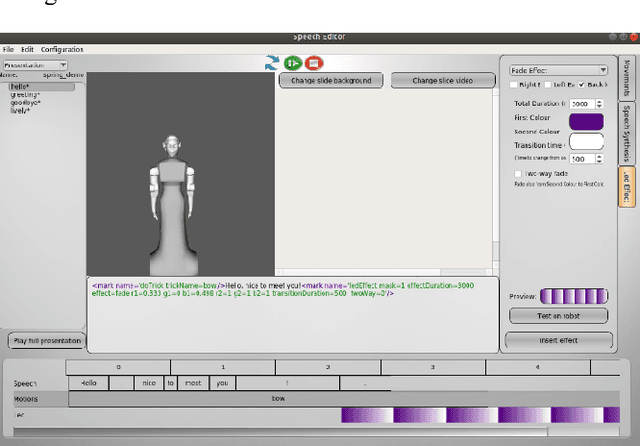
Despite the many recent achievements in developing and deploying social robotics, there are still many underexplored environments and applications for which systematic evaluation of such systems by end-users is necessary. While several robotic platforms have been used in gerontological healthcare, the question of whether or not a social interactive robot with multi-modal conversational capabilities will be useful and accepted in real-life facilities is yet to be answered. This paper is an attempt to partially answer this question, via two waves of experiments with patients and companions in a day-care gerontological facility in Paris with a full-sized humanoid robot endowed with social and conversational interaction capabilities. The software architecture, developed during the H2020 SPRING project, together with the experimental protocol, allowed us to evaluate the acceptability (AES) and usability (SUS) with more than 60 end-users. Overall, the users are receptive to this technology, especially when the robot perception and action skills are robust to environmental clutter and flexible to handle a plethora of different interactions.
TIAGo RL: Simulated Reinforcement Learning Environments with Tactile Data for Mobile Robots
Nov 13, 2023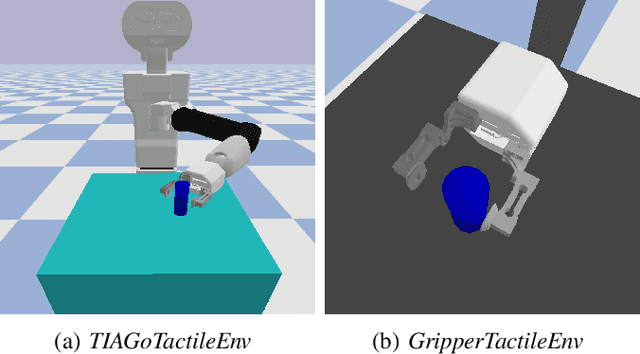
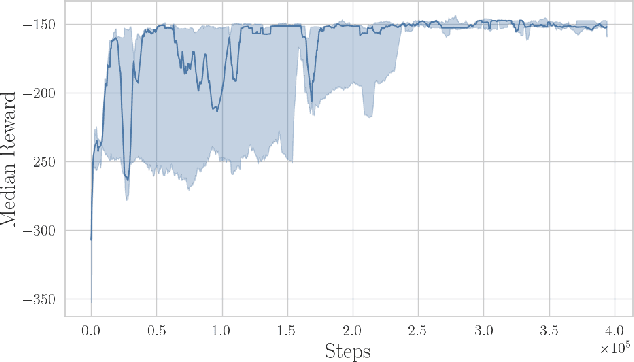
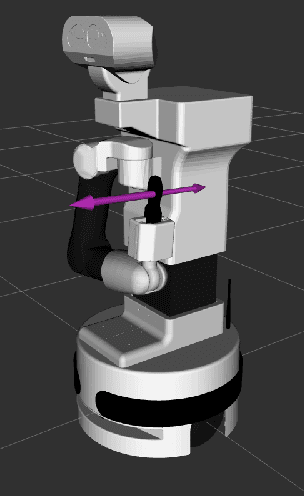
Tactile information is important for robust performance in robotic tasks that involve physical interaction, such as object manipulation. However, with more data included in the reasoning and control process, modeling behavior becomes increasingly difficult. Deep Reinforcement Learning (DRL) produced promising results for learning complex behavior in various domains, including tactile-based manipulation in robotics. In this work, we present our open-source reinforcement learning environments for the TIAGo service robot. They produce tactile sensor measurements that resemble those of a real sensorised gripper for TIAGo, encouraging research in transfer learning of DRL policies. Lastly, we show preliminary training results of a learned force control policy and compare it to a classical PI controller.
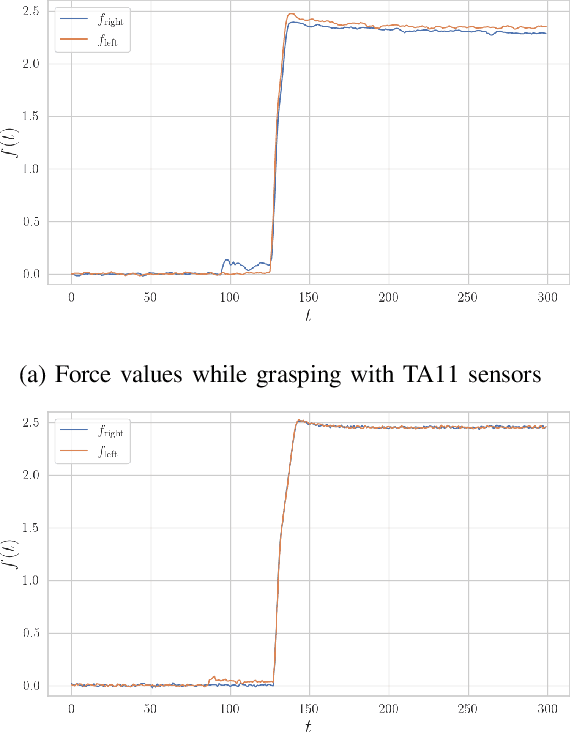
Bio-Inspired Grasping Controller for Sensorized 2-DoF Grippers
Nov 13, 2023We present a holistic grasping controller, combining free-space position control and in-contact force-control for reliable grasping given uncertain object pose estimates. Employing tactile fingertip sensors, undesired object displacement during grasping is minimized by pausing the finger closing motion for individual joints on first contact until force-closure is established. While holding an object, the controller is compliant with external forces to avoid high internal object forces and prevent object damage. Gravity as an external force is explicitly considered and compensated for, thus preventing gravity-induced object drift. We evaluate the controller in two experiments on the TIAGo robot and its parallel-jaw gripper proving the effectiveness of the approach for robust grasping and minimizing object displacement. In a series of ablation studies, we demonstrate the utility of the individual controller components.
Lessons Learnt from Deploying ARI in Residential Care
Jul 06, 2022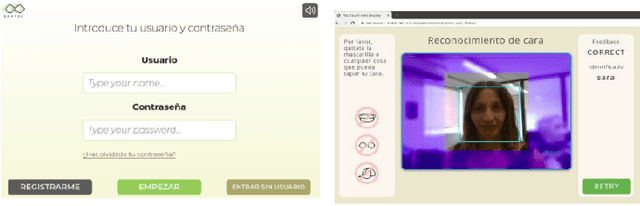
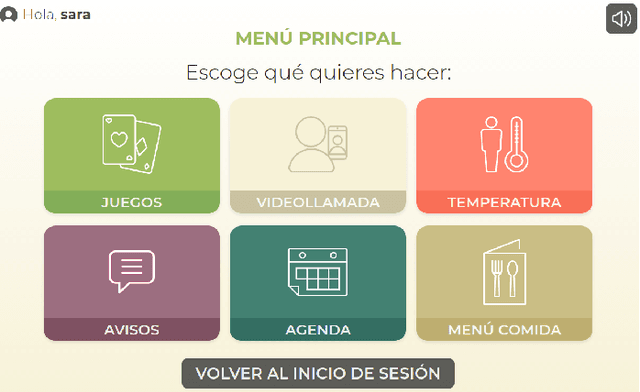
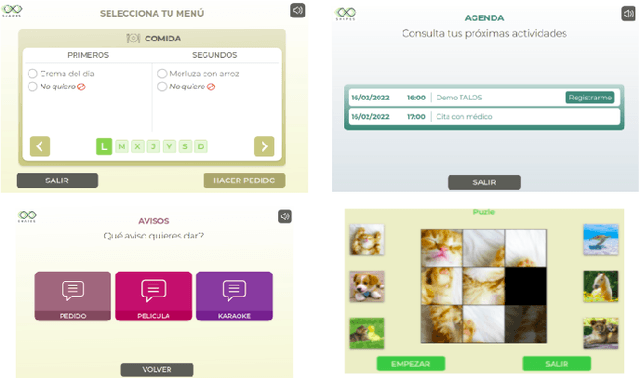
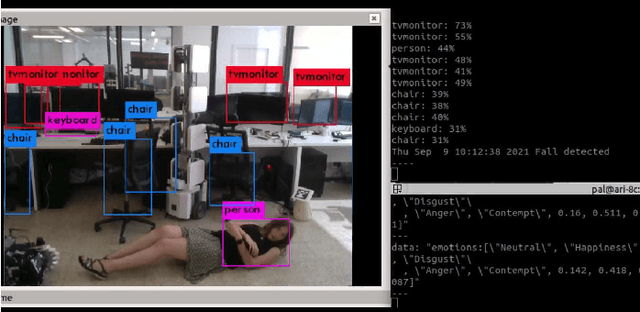
This paper describes the final prototype of an assistive robot used for increasing engagement of older adults in the context of SHAPES project. It then highlights lessons learned from hands-on training during the first phases of the pilots at Clinica Humana and Can Granada residence in Mallorca (Spain).
Robot to support older people to live independently
Apr 15, 2021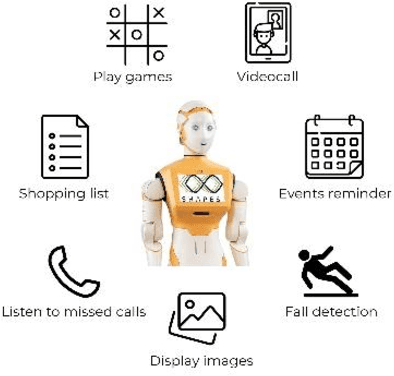
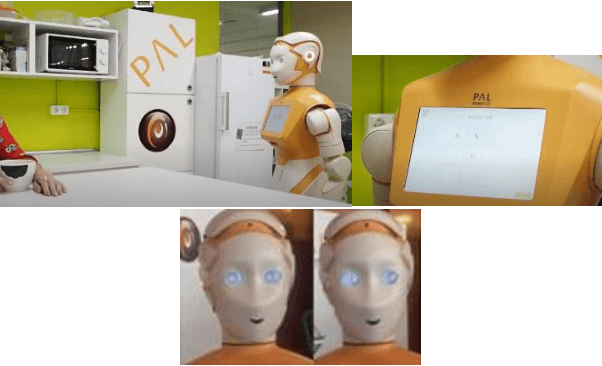
This paper presents an overview on how the PAL Robotics ARI robot is participating in the European SHAPES project to promote healthy and active living among older people, by integrating digital solutions from project partners and adapting the system in order to improve human-robot interaction and user acceptability in a wide range of tasks.
Leveraging Touch Sensors to Improve Mobile Manipulation
Oct 21, 2020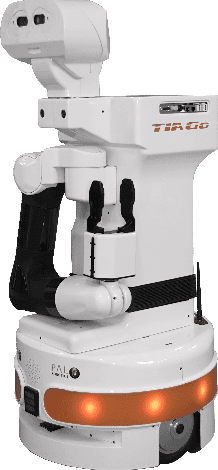
Despite many advances in service robotics, successful and secure object manipulation on mobile platforms is still a challenge. In order to come closer to human grasping performance, it is natural to provide robots with the same capability that humans have: the sense of touch. This abstract presents novel, tactile-equipped end-effectors for the service robot TIAGo that are currently being developed. Their primary goal is to improve reliability and success of mobile manipulation, but they also enable further research in related fields such as learning by human demonstration, object exploration and force control algorithms.