Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWoLF: the Whole-body Locomotion Framework for Quadruped Robots
Paper and Code
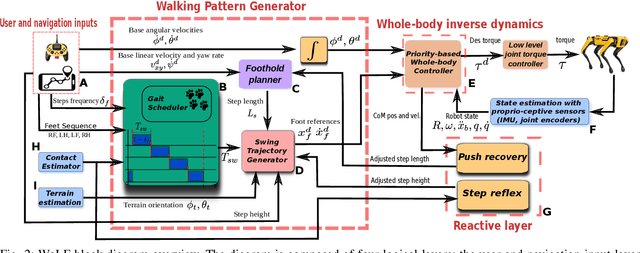
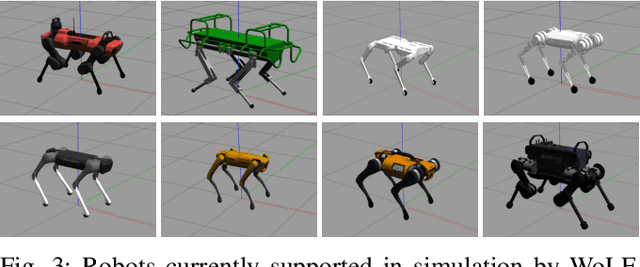
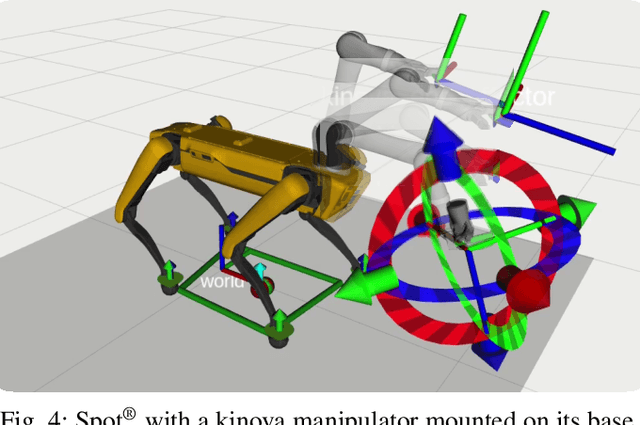
The Whole-Body Locomotion Framework (WoLF) is an end-to-end software suite devoted to the loco-manipulation of quadruped robots. WoLF abstracts the complexity of planning and control of quadrupedal robot hardware into a simple to use and robust software that can be connected through multiple tele-operation devices to different quadruped robot models. Furthermore, WoLF allows controlling mounted devices, such as arms or pan-tilt cameras, jointly with the quadrupedal platform. In this short paper, we introduce the main features of WoLF and its overall software architecture.
View paper on