Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrototyping fast and agile motions for legged robots with Horizon
Paper and Code

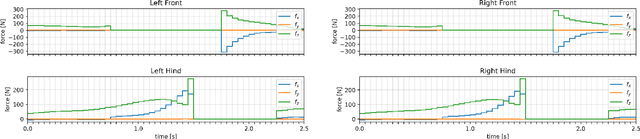
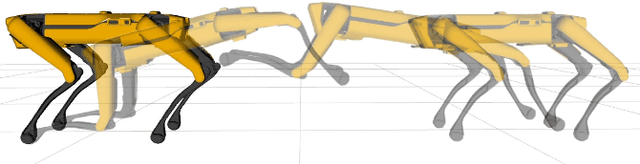
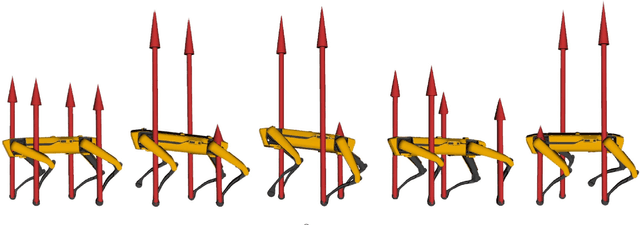
For legged robots to perform agile, highly dynamic and contact-rich motions, whole-body trajectories computation of under-actuated complex systems subject to non-linear dynamics is required. In this work, we present hands-on applications of Horizon, a novel open-source framework for trajectory optimization tailored to robotic systems, that provides a collection of tools to simplify dynamic motion generation. Horizon was tested on a broad range of behaviours involving several robotic platforms: we introduce its building blocks and describe the complete procedure to generate three complex motions using its intuitive and straightforward API.
* 4 pages, 5 figures, workshop paper: 6th Workshop on Legged Robots
View paper on