 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymbolically-Guided Visual Plan Inference from Uncurated Video Data
May 13, 2025Visual planning, by offering a sequence of intermediate visual subgoals to a goal-conditioned low-level policy, achieves promising performance on long-horizon manipulation tasks. To obtain the subgoals, existing methods typically resort to video generation models but suffer from model hallucination and computational cost. We present Vis2Plan, an efficient, explainable and white-box visual planning framework powered by symbolic guidance. From raw, unlabeled play data, Vis2Plan harnesses vision foundation models to automatically extract a compact set of task symbols, which allows building a high-level symbolic transition graph for multi-goal, multi-stage planning. At test time, given a desired task goal, our planner conducts planning at the symbolic level and assembles a sequence of physically consistent intermediate sub-goal images grounded by the underlying symbolic representation. Our Vis2Plan outperforms strong diffusion video generation-based visual planners by delivering 53\% higher aggregate success rate in real robot settings while generating visual plans 35$\times$ faster. The results indicate that Vis2Plan is able to generate physically consistent image goals while offering fully inspectable reasoning steps.
A High-Force Gripper with Embedded Multimodal Sensing for Powerful and Perception Driven Grasping
Apr 07, 2025Modern humanoid robots have shown their promising potential for executing various tasks involving the grasping and manipulation of objects using their end-effectors. Nevertheless, in the most of the cases, the grasping and manipulation actions involve low to moderate payload and interaction forces. This is due to limitations often presented by the end-effectors, which can not match their arm-reachable payload, and hence limit the payload that can be grasped and manipulated. In addition, grippers usually do not embed adequate perception in their hardware, and grasping actions are mainly driven by perception sensors installed in the rest of the robot body, frequently affected by occlusions due to the arm motions during the execution of the grasping and manipulation tasks. To address the above, we developed a modular high grasping force gripper equipped with embedded multi-modal perception functionalities. The proposed gripper can generate a grasping force of 110 N in a compact implementation. The high grasping force capability is combined with embedded multi-modal sensing, which includes an eye-in-hand camera, a Time-of-Flight (ToF) distance sensor, an Inertial Measurement Unit (IMU) and an omnidirectional microphone, permitting the implementation of perception-driven grasping functionalities. We extensively evaluated the grasping force capacity of the gripper by introducing novel payload evaluation metrics that are a function of the robot arm's dynamic motion and gripper thermal states. We also evaluated the embedded multi-modal sensing by performing perception-guided enhanced grasping operations.
* 8 pages, 15 figures
A Temporal Planning Framework for Multi-Agent Systems via LLM-Aided Knowledge Base Management
Feb 26, 2025This paper presents a novel framework, called PLANTOR (PLanning with Natural language for Task-Oriented Robots), that integrates Large Language Models (LLMs) with Prolog-based knowledge management and planning for multi-robot tasks. The system employs a two-phase generation of a robot-oriented knowledge base, ensuring reusability and compositional reasoning, as well as a three-step planning procedure that handles temporal dependencies, resource constraints, and parallel task execution via mixed-integer linear programming. The final plan is converted into a Behaviour Tree for direct use in ROS2. We tested the framework in multi-robot assembly tasks within a block world and an arch-building scenario. Results demonstrate that LLMs can produce accurate knowledge bases with modest human feedback, while Prolog guarantees formal correctness and explainability. This approach underscores the potential of LLM integration for advanced robotics tasks requiring flexible, scalable, and human-understandable planning.
Constructing Behavior Trees from Temporal Plans for Robotic Applications
Jun 25, 2024



Executing temporal plans in the real and open world requires adapting to uncertainty both in the environment and in the plan actions. A plan executor must therefore be flexible to dispatch actions based on the actual execution conditions. In general, this involves considering both event and time-based constraints between the actions in the plan. A simple temporal network (STN) is a convenient framework for specifying the constraints between actions in the plan. Likewise, a behavior tree (BT) is a convenient framework for controlling the execution flow of the actions in the plan. The principle contributions of this paper are i) an algorithm for transforming a plan into an STN, and ii) an algorithm for transforming an STN into a BT. When combined, these algorithms define a systematic approach for executing total-order (time-triggered) plans in robots operating in the real world. Our approach is based on creating a graph describing a deordered (state-triggered) plan and then creating a BT representing a partial-order (determined at runtime) plan. This approach ensures the correct execution of plans, including those with required concurrency. We demonstrate the validity of our approach within the PlanSys2 framework on real robots.
Semantic-based Loco-Manipulation for Human-Robot Collaboration in Industrial Environments
Dec 22, 2023Robots with a high level of autonomy are increasingly requested by smart industries. A way to reduce the workers' stress and effort is to optimize the working environment by taking advantage of autonomous collaborative robots. A typical task for Human-Robot Collaboration (HRC) which improves the working setup in an industrial environment is the \textit{"bring me an object please"} where the user asks the collaborator to search for an object while he/she is focused on something else. As often happens, science fiction is ahead of the times, indeed, in the \textit{Iron Man} movie, the robot \textit{Dum-E} helps its creator, \textit{Tony Stark}, to create its famous armours. The ability of the robot to comprehend the semantics of the environment and engage with it is valuable for the human execution of more intricate tasks. In this work, we reproduce this operation to enable a mobile robot with manipulation and grasping capabilities to leverage its geometric and semantic understanding of the environment for the execution of the \textit{Bring Me} action, thereby assisting a worker autonomously. Results are provided to validate the proposed workflow in a simulated environment populated with objects and people. This framework aims to take a step forward in assistive robotics autonomy for industries and domestic environments.
Evaluating Heuristic Search Algorithms in Pathfinding: A Comprehensive Study on Performance Metrics and Domain Parameters
Oct 03, 2023The paper presents a comprehensive performance evaluation of some heuristic search algorithms in the context of autonomous systems and robotics. The objective of the study is to evaluate and compare the performance of different search algorithms in different problem settings on the pathfinding domain. Experiments give us insight into the behavior of the evaluated heuristic search algorithms, over the variation of different parameters: domain size, obstacle density, and distance between the start and the goal states. Results are then used to design a selection algorithm that, on the basis of problem characteristics, suggests the best search algorithm to use.
* In Proceedings AREA 2023, arXiv:2310.00333
When Prolog meets generative models: a new approach for managing knowledge and planning in robotic applications
Sep 26, 2023



In this paper, we propose a robot oriented knowledge management system based on the use of the Prolog language. Our framework hinges on a special organisation of knowledge base that enables: 1. its efficient population from natural language texts using semi-automated procedures based on Large Language Models, 2. the bumpless generation of temporal parallel plans for multi-robot systems through a sequence of transformations, 3. the automated translation of the plan into an executable formalism (the behaviour trees). The framework is supported by a set of open source tools and is shown on a realistic application.
Implementing BDI Continual Temporal Planning for Robotic Agents
Sep 01, 2023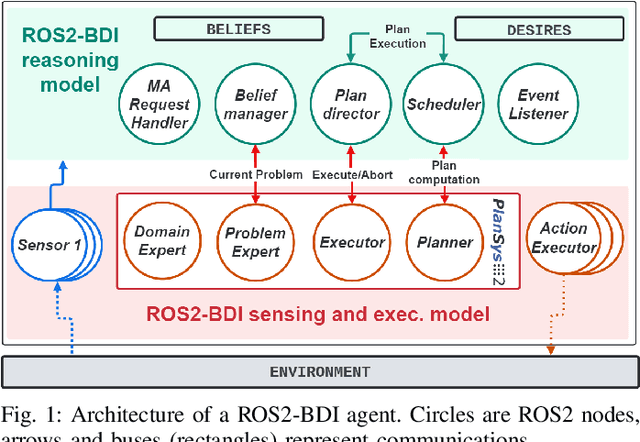
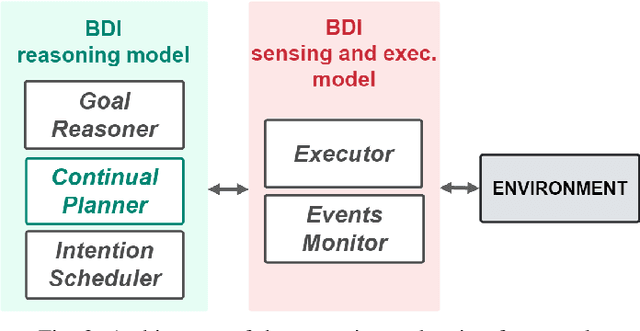
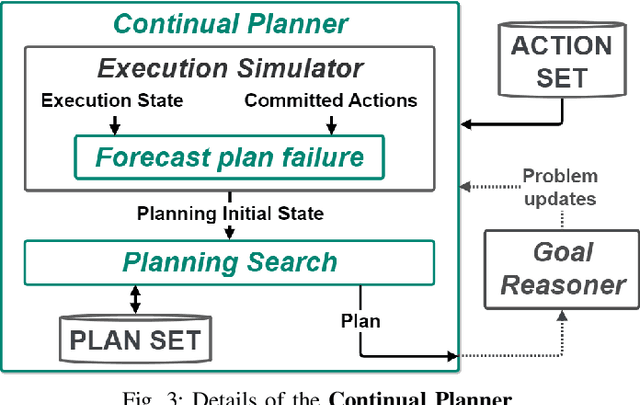
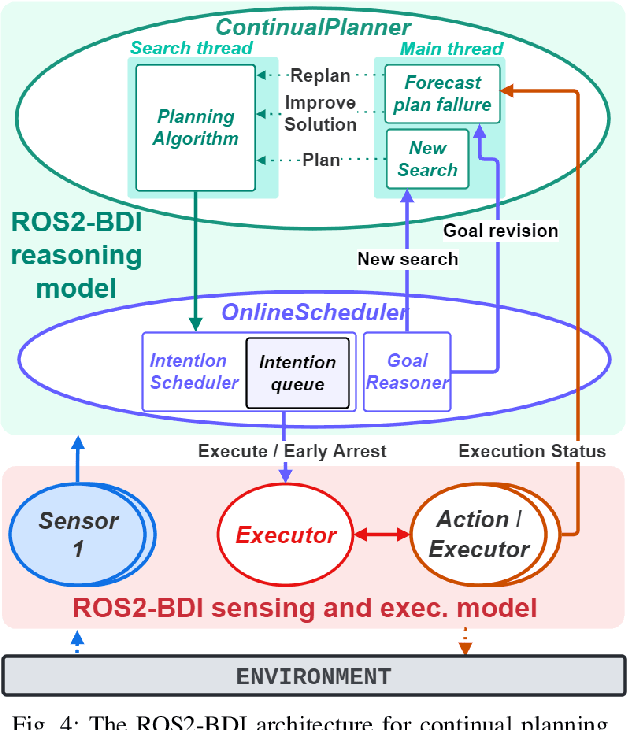
Making autonomous agents effective in real-life applications requires the ability to decide at run-time and a high degree of adaptability to unpredictable and uncontrollable events. Reacting to events is still a fundamental ability for an agent, but it has to be boosted up with proactive behaviors that allow the agent to explore alternatives and decide at run-time for optimal solutions. This calls for a continuous planning as part of the deliberation process that makes an agent able to reconsider plans on the base of temporal constraints and changes of the environment. Online planning literature offers several approaches used to select the next action on the base of a partial exploration of the solution space. In this paper, we propose a BDI continuous temporal planning framework, where interleave planning and execution loop is used to integrate online planning with the BDI control-loop. The framework has been implemented with the ROS2 robotic framework and planning algorithms offered by JavaFF.
Computing unsatisfiable cores for LTLf specifications
Mar 09, 2022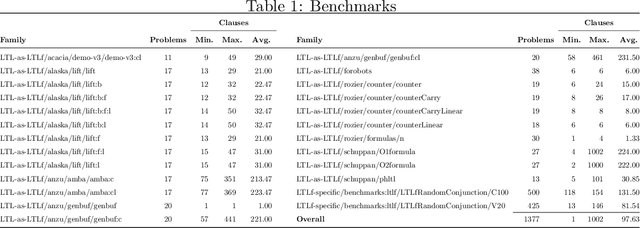
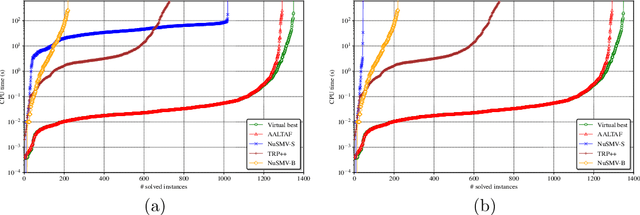
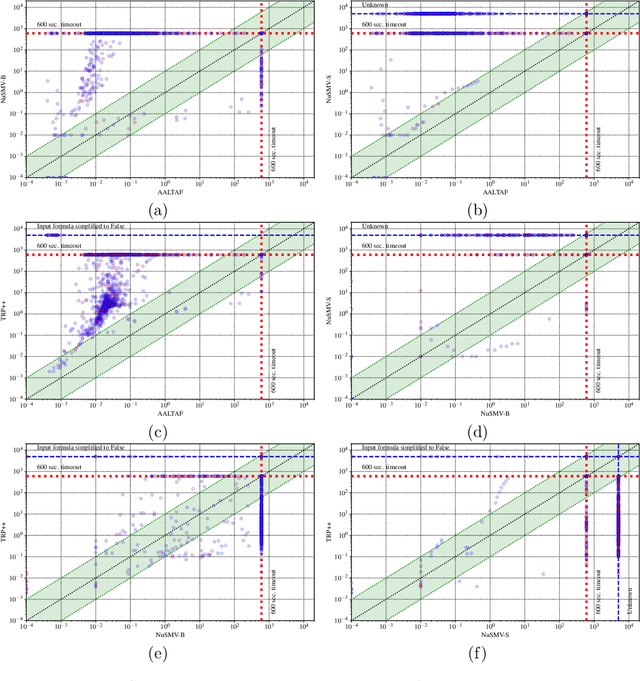
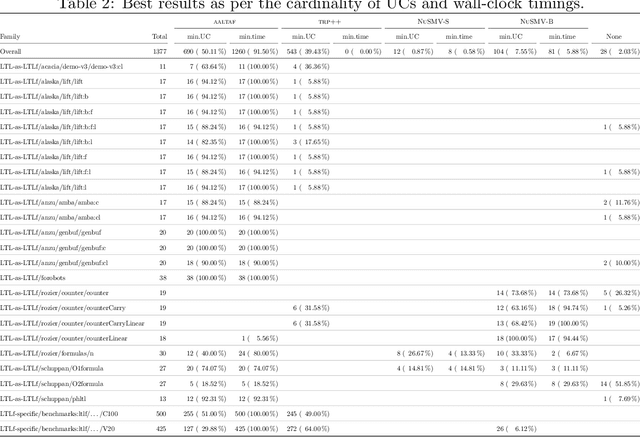
Linear-time temporal logic on finite traces (LTLf) is rapidly becoming a de-facto standard to produce specifications in many application domains (e.g., planning, business process management, run-time monitoring, reactive synthesis). Several studies approached the respective satisfiability problem. In this paper, we investigate the problem of extracting the unsatisfiable core in LTLf specifications. We provide four algorithms for extracting an unsatisfiable core leveraging the adaptation of state-of-the-art approaches to LTLf satisfiability checking. We implement the different approaches within the respective tools and carry out an experimental evaluation on a set of reference benchmarks, restricting to the unsatisfiable ones. The results show the feasibility, effectiveness, and complementarities of the different algorithms and tools.