 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Temporal Planning Framework for Multi-Agent Systems via LLM-Aided Knowledge Base Management
Feb 26, 2025This paper presents a novel framework, called PLANTOR (PLanning with Natural language for Task-Oriented Robots), that integrates Large Language Models (LLMs) with Prolog-based knowledge management and planning for multi-robot tasks. The system employs a two-phase generation of a robot-oriented knowledge base, ensuring reusability and compositional reasoning, as well as a three-step planning procedure that handles temporal dependencies, resource constraints, and parallel task execution via mixed-integer linear programming. The final plan is converted into a Behaviour Tree for direct use in ROS2. We tested the framework in multi-robot assembly tasks within a block world and an arch-building scenario. Results demonstrate that LLMs can produce accurate knowledge bases with modest human feedback, while Prolog guarantees formal correctness and explainability. This approach underscores the potential of LLM integration for advanced robotics tasks requiring flexible, scalable, and human-understandable planning.
Fast Shortest Path Polyline Smoothing With G1 Continuity and Bounded Curvature
Sep 15, 2024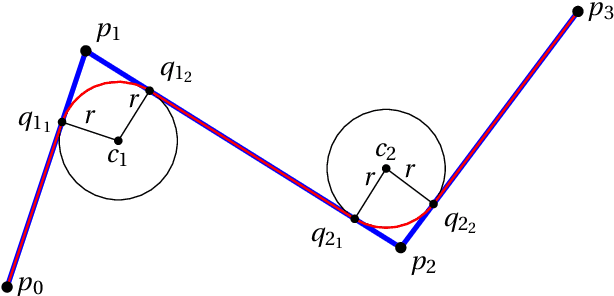
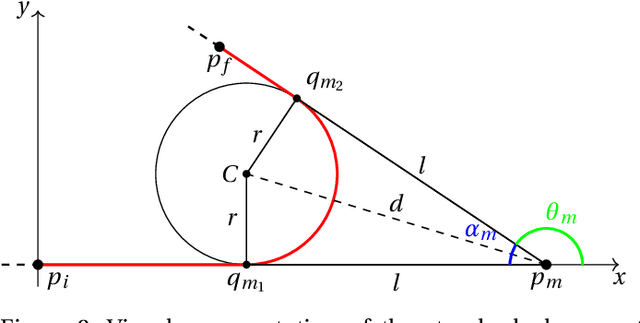
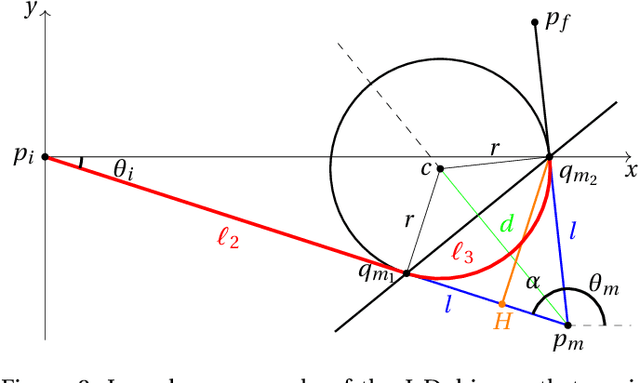
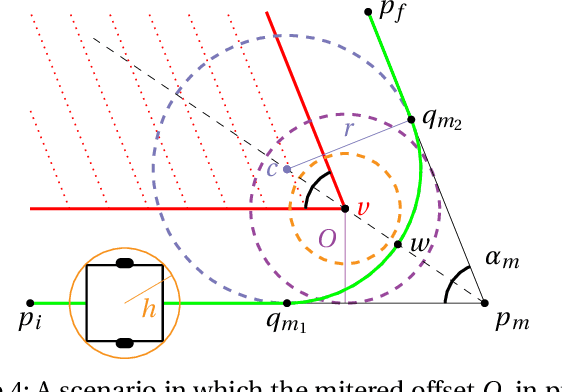
In this work, we propose a novel and efficient method for smoothing polylines in motion planning tasks. The algorithm applies to motion planning of vehicles with bounded curvature. In the paper, we show that the generated path: 1) has minimal length, 2) is $G^1$ continuous, and 3) is collision-free by construction, if the hypotheses are respected. We compare our solution with the state-of.the-art and show its convenience both in terms of computation time and of length of the compute path.
When Prolog meets generative models: a new approach for managing knowledge and planning in robotic applications
Sep 26, 2023



In this paper, we propose a robot oriented knowledge management system based on the use of the Prolog language. Our framework hinges on a special organisation of knowledge base that enables: 1. its efficient population from natural language texts using semi-automated procedures based on Large Language Models, 2. the bumpless generation of temporal parallel plans for multi-robot systems through a sequence of transformations, 3. the automated translation of the plan into an executable formalism (the behaviour trees). The framework is supported by a set of open source tools and is shown on a realistic application.