Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Shortest Path Polyline Smoothing With G1 Continuity and Bounded Curvature
Sep 15, 2024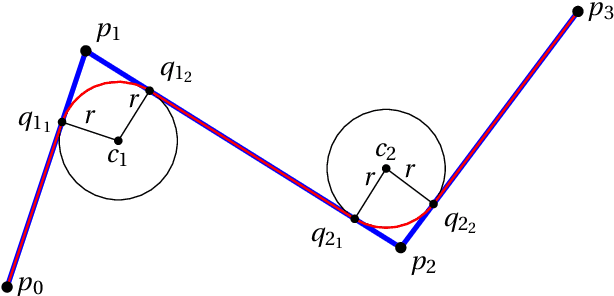
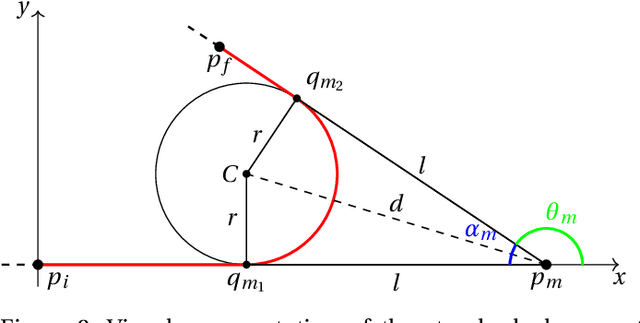
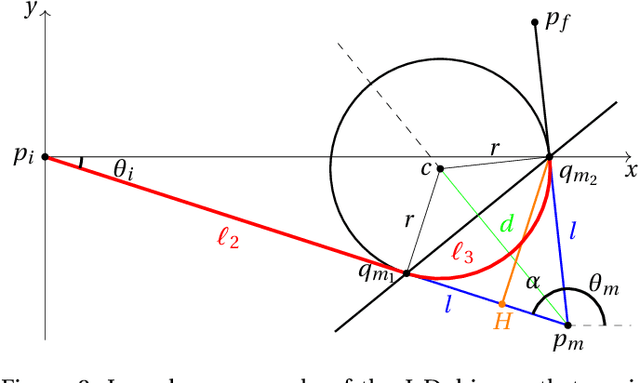
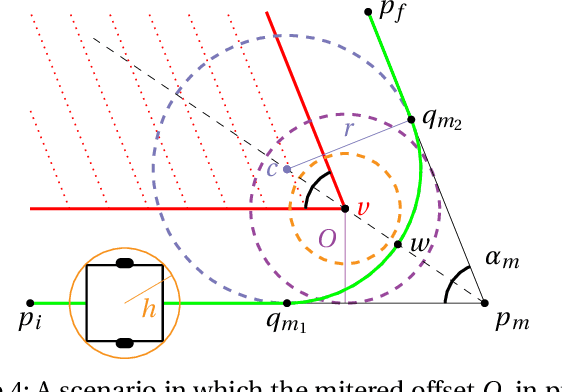
In this work, we propose a novel and efficient method for smoothing polylines in motion planning tasks. The algorithm applies to motion planning of vehicles with bounded curvature. In the paper, we show that the generated path: 1) has minimal length, 2) is $G^1$ continuous, and 3) is collision-free by construction, if the hypotheses are respected. We compare our solution with the state-of.the-art and show its convenience both in terms of computation time and of length of the compute path.
Via