 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Shortest Path Polyline Smoothing With G1 Continuity and Bounded Curvature
Sep 15, 2024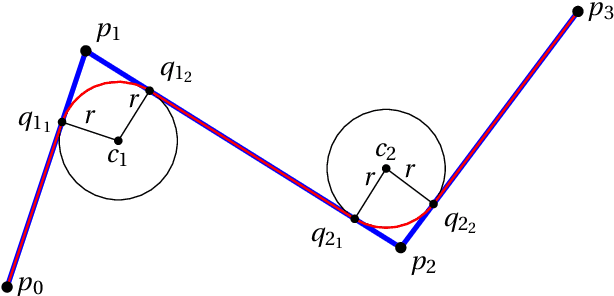
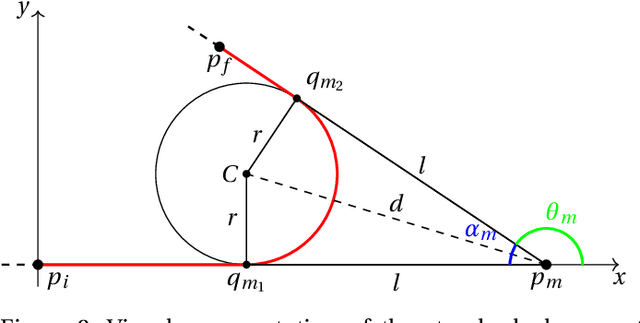
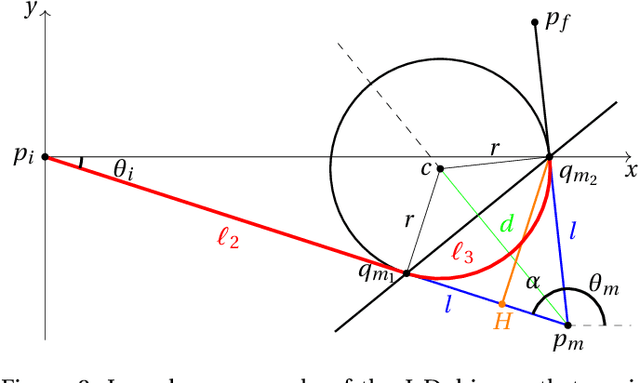
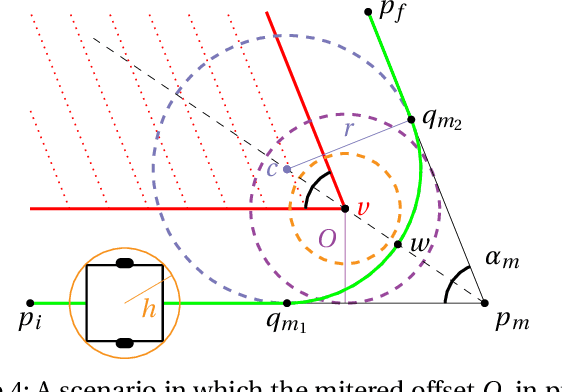
In this work, we propose a novel and efficient method for smoothing polylines in motion planning tasks. The algorithm applies to motion planning of vehicles with bounded curvature. In the paper, we show that the generated path: 1) has minimal length, 2) is $G^1$ continuous, and 3) is collision-free by construction, if the hypotheses are respected. We compare our solution with the state-of.the-art and show its convenience both in terms of computation time and of length of the compute path.
ALPINE: a climbing robot for operations in mountain environments
Mar 22, 2024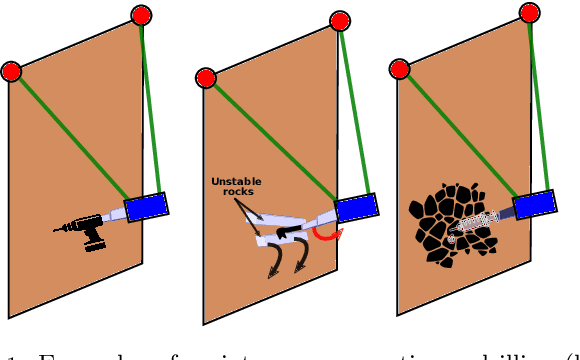

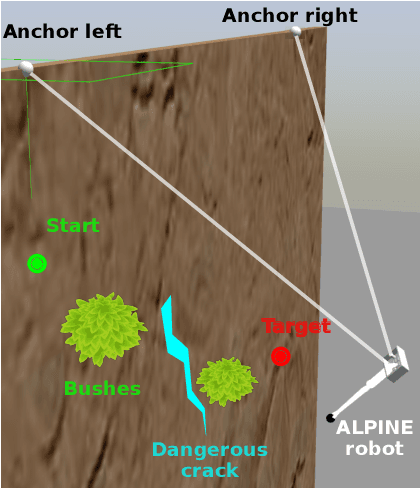

Mountain slopes are perfect examples of harsh environments in which humans are required to perform difficult and dangerous operations such as removing unstable boulders, dangerous vegetation or deploying safety nets. A good replacement for human intervention can be offered by climbing robots. The different solutions existing in the literature are not up to the task for the difficulty of the requirements (navigation, heavy payloads, flexibility in the execution of the tasks). In this paper, we propose a robotic platform that can fill this gap. Our solution is based on a robot that hangs on ropes, and uses a retractable leg to jump away from the mountain walls. Our package of mechanical solutions, along with the algorithms developed for motion planning and control, delivers swift navigation on irregular and steep slopes, the possibility to overcome or travel around significant natural barriers, and the ability to carry heavy payloads and execute complex tasks. In the paper, we give a full account of our main design and algorithmic choices and show the feasibility of the solution through a large number of physically simulated scenarios.
CLIO: a Novel Robotic Solution for Exploration and Rescue Missions in Hostile Mountain Environments
Sep 20, 2022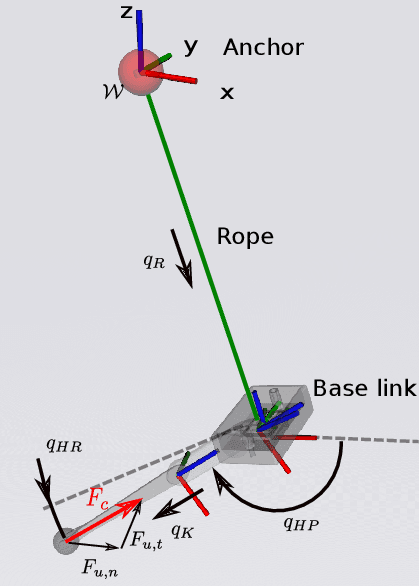
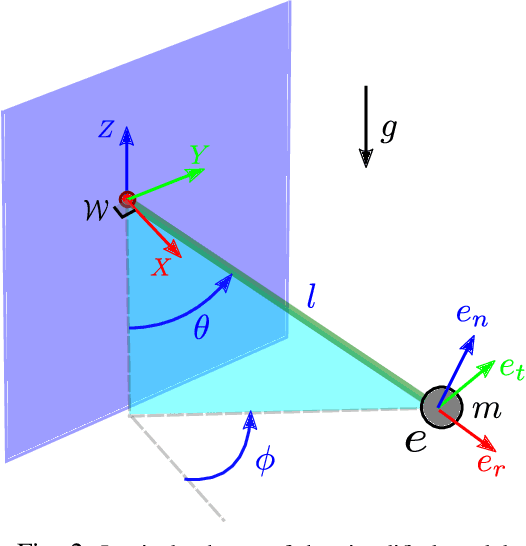
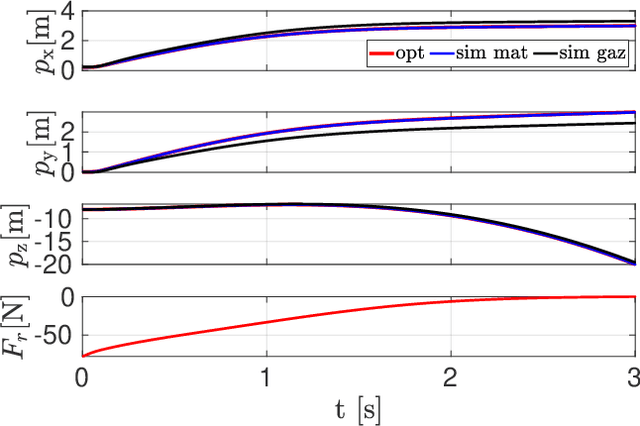
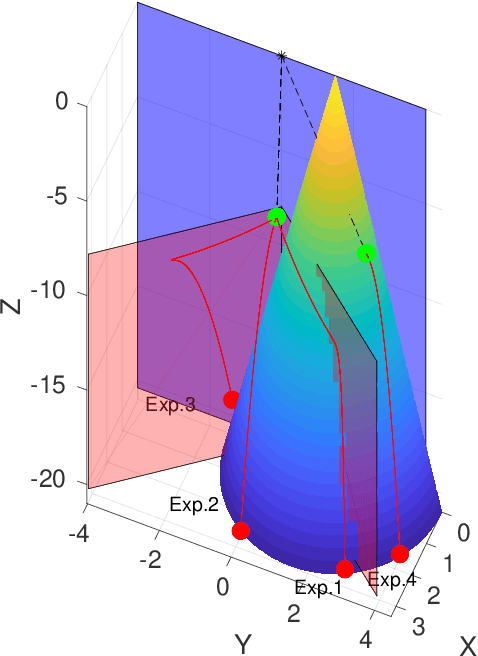
Rescue missions in mountain environments are hardly achievable by standard legged robots - because of the high slopes - or by flying robots - because of limited payload capacity. We present a novel concept for a rope-aided climbing robot, which can negotiate up-to-vertical slopes and carry heavy payloads. The robot is attached to the mountain through a rope, and is equipped with a leg to push against the mountain and initiate jumping maneuvers. Between jumps, a hoist is used to wind/unwind the rope to move vertically and affect the lateral motion. This simple (yet effective) two-fold actuation allows the system to achieve high safety and energy efficiency. Indeed, the rope prevents the robot from falling, while compensating for most of its weight, drastically reducing the effort required by the leg actuator. We also present an optimal control strategy to generate point-to-point trajectories overcoming an obstacle. We achieve fast computation time ($<$1 s) thanks to the use of a custom simplified robot model. We validated the generated optimal movements in Gazebo simulations with a complete robot model, showing the effectiveness of the proposed approach, and confirming the interest of our concept. Finally, we performed a reachability analysis showing that the region of achievable targets is strongly affected by the friction properties of the foot-wall contact.