 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Robotic Tissue Palpation and Abnormalities Characterisation via Ergodic Exploration
Feb 15, 2026We propose a novel autonomous robotic palpation framework for real-time elastic mapping during tissue exploration using a viscoelastic tissue model. The method combines force-based parameter estimation using a commercial force/torque sensor with an ergodic control strategy driven by a tailored Expected Information Density, which explicitly biases exploration toward diagnostically relevant regions by jointly considering model uncertainty, stiffness magnitude, and spatial gradients. An Extended Kalman Filter is employed to estimate viscoelastic model parameters online, while Gaussian Process Regression provides spatial modelling of the estimated elasticity, and a Heat Equation Driven Area Coverage controller enables adaptive, continuous trajectory planning. Simulations on synthetic stiffness maps demonstrate that the proposed approach achieves better reconstruction accuracy, enhanced segmentation capability, and improved robustness in detecting stiff inclusions compared to Bayesian Optimisation-based techniques. Experimental validation on a silicone phantom with embedded inclusions emulating pathological tissue regions further corroborates the potential of the method for autonomous tissue characterisation in diagnostic and screening applications.
A Task-Driven, Planner-in-the-Loop Computational Design Framework for Modular Manipulators
Dec 18, 2025Modular manipulators composed of pre-manufactured and interchangeable modules offer high adaptability across diverse tasks. However, their deployment requires generating feasible motions while jointly optimizing morphology and mounted pose under kinematic, dynamic, and physical constraints. Moreover, traditional single-branch designs often extend reach by increasing link length, which can easily violate torque limits at the base joint. To address these challenges, we propose a unified task-driven computational framework that integrates trajectory planning across varying morphologies with the co-optimization of morphology and mounted pose. Within this framework, a hierarchical model predictive control (HMPC) strategy is developed to enable motion planning for both redundant and non-redundant manipulators. For design optimization, the CMA-ES is employed to efficiently explore a hybrid search space consisting of discrete morphology configurations and continuous mounted poses. Meanwhile, a virtual module abstraction is introduced to enable bi-branch morphologies, allowing an auxiliary branch to offload torque from the primary branch and extend the achievable workspace without increasing the capacity of individual joint modules. Extensive simulations and hardware experiments on polishing, drilling, and pick-and-place tasks demonstrate the effectiveness of the proposed framework. The results show that: 1) the framework can generate multiple feasible designs that satisfy kinematic and dynamic constraints while avoiding environmental collisions for given tasks; 2) flexible design objectives, such as maximizing manipulability, minimizing joint effort, or reducing the number of modules, can be achieved by customizing the cost functions; and 3) a bi-branch morphology capable of operating in a large workspace can be realized without requiring more powerful basic modules.
Surface Defect Identification using Bayesian Filtering on a 3D Mesh
Jan 30, 2025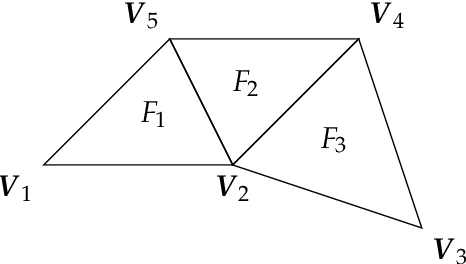
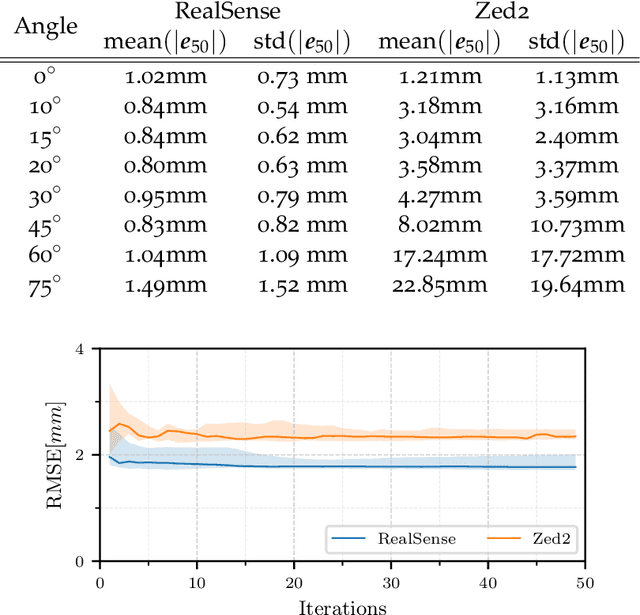
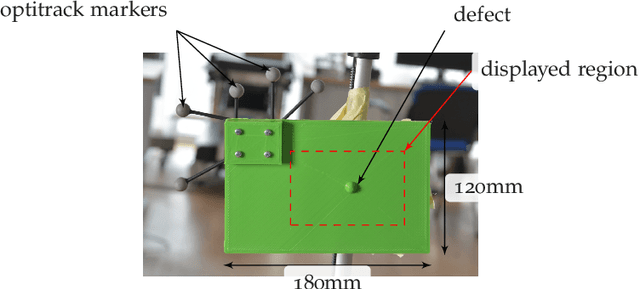
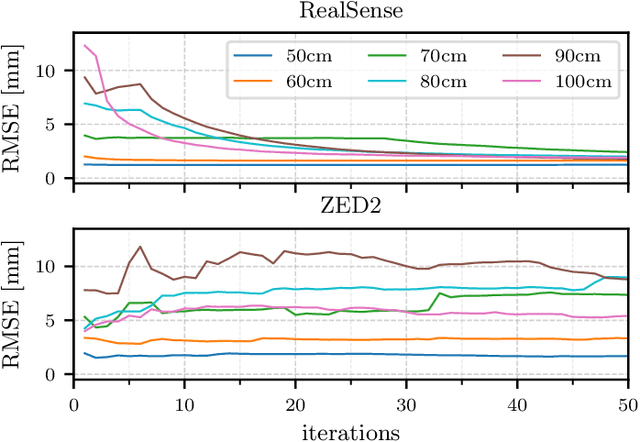
This paper presents a CAD-based approach for automated surface defect detection. We leverage the a-priori knowledge embedded in a CAD model and integrate it with point cloud data acquired from commercially available stereo and depth cameras. The proposed method first transforms the CAD model into a high-density polygonal mesh, where each vertex represents a state variable in 3D space. Subsequently, a weighted least squares algorithm is employed to iteratively estimate the state of the scanned workpiece based on the captured point cloud measurements. This framework offers the potential to incorporate information from diverse sensors into the CAD domain, facilitating a more comprehensive analysis. Preliminary results demonstrate promising performance, with the algorithm achieving convergence to a sub-millimeter standard deviation in the region of interest using only approximately 50 point cloud samples. This highlights the potential of utilising commercially available stereo cameras for high-precision quality control applications.
Learning Priors of Human Motion With Vision Transformers
Jan 30, 2025



A clear understanding of where humans move in a scenario, their usual paths and speeds, and where they stop, is very important for different applications, such as mobility studies in urban areas or robot navigation tasks within human-populated environments. We propose in this article, a neural architecture based on Vision Transformers (ViTs) to provide this information. This solution can arguably capture spatial correlations more effectively than Convolutional Neural Networks (CNNs). In the paper, we describe the methodology and proposed neural architecture and show the experiments' results with a standard dataset. We show that the proposed ViT architecture improves the metrics compared to a method based on a CNN.
Socially-Aware Opinion-Based Navigation with Oval Limit Cycles
Nov 07, 2024
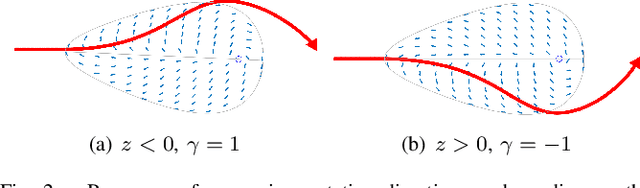
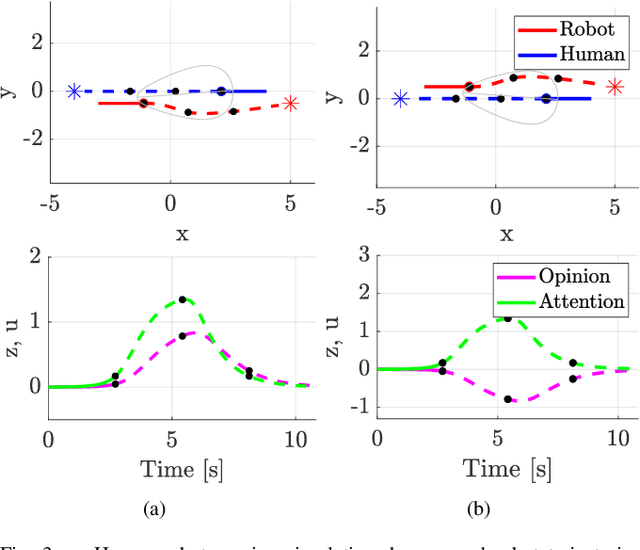
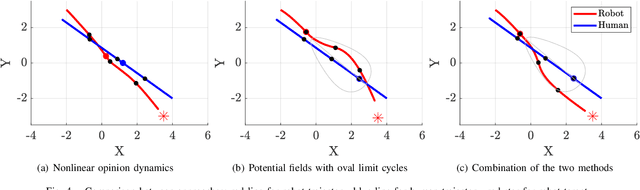
When humans move in a shared space, they choose navigation strategies that preserve their mutual safety. At the same time, each human seeks to minimise the number of modifications to her/his path. In order to achieve this result, humans use unwritten rules and reach a consensus on their decisions about the motion direction by exchanging non-verbal messages. They then implement their choice in a mutually acceptable way. Socially-aware navigation denotes a research effort aimed at replicating this logic inside robots. Existing results focus either on how robots can participate in negotiations with humans, or on how they can move in a socially acceptable way. We propose a holistic approach in which the two aspects are jointly considered. Specifically, we show that by combining opinion dynamics (to reach a consensus) with vortex fields (to generate socially acceptable trajectories), the result outperforms the application of the two techniques in isolation.
MeshDMP: Motion Planning on Discrete Manifolds using Dynamic Movement Primitives
Oct 19, 2024An open problem in industrial automation is to reliably perform tasks requiring in-contact movements with complex workpieces, as current solutions lack the ability to seamlessly adapt to the workpiece geometry. In this paper, we propose a Learning from Demonstration approach that allows a robot manipulator to learn and generalise motions across complex surfaces by leveraging differential mathematical operators on discrete manifolds to embed information on the geometry of the workpiece extracted from triangular meshes, and extend the Dynamic Movement Primitives (DMPs) framework to generate motions on the mesh surfaces. We also propose an effective strategy to adapt the motion to different surfaces, by introducing an isometric transformation of the learned forcing term. The resulting approach, namely MeshDMP, is evaluated both in simulation and real experiments, showing promising results in typical industrial automation tasks like car surface polishing.
Pseudo-kinematic trajectory control of tracked vehicles
Sep 27, 2024



Tracked vehicles are used in complex scenarios, where motion planning and navigation can be very complex. They have complex dynamics, with many parameters that are difficult to identify and that change significantly based on the operating conditions. We propose a simple pseudo-kinematic model, where the intricate dynamic effects underlying the vehicle's motion are captured in a small set of velocity-dependent parameters. This choice enables the development of a Lyapunov-based trajectory controller with guaranteed performance and small computation time. We demonstrate the correctness of our approach with both simulation and experimental data.
An Anatomy-Aware Shared Control Approach for Assisted Teleoperation of Lung Ultrasound Examinations
Sep 25, 2024



The introduction of artificial intelligence and robotics in telehealth is enabling personalised treatment and supporting teleoperated procedures such as lung ultrasound, which has gained attention during the COVID-19 pandemic. Although fully autonomous systems face challenges due to anatomical variability, teleoperated systems appear to be more practical in current healthcare settings. This paper presents an anatomy-aware control framework for teleoperated lung ultrasound. Using biomechanically accurate 3D models such as SMPL and SKEL, the system provides a real-time visual feedback and applies virtual constraints to assist in precise probe placement tasks. Evaluations on five subjects show the accuracy of the biomechanical models and the efficiency of the system in improving probe placement and reducing procedure time compared to traditional teleoperation. The results demonstrate that the proposed framework enhances the physician's capabilities in executing remote lung ultrasound examinations, towards more objective and repeatable acquisitions.
Modular Meshed Ultra-Wideband Aided Inertial Navigation with Robust Anchor Calibration
Aug 26, 2024



This paper introduces a generic filter-based state estimation framework that supports two state-decoupling strategies based on cross-covariance factorization. These strategies reduce the computational complexity and inherently support true modularity -- a perquisite for handling and processing meshed range measurements among a time-varying set of devices. In order to utilize these measurements in the estimation framework, positions of newly detected stationary devices (anchors) and the pairwise biases between the ranging devices are required. In this work an autonomous calibration procedure for new anchors is presented, that utilizes range measurements from multiple tags as well as already known anchors. To improve the robustness, an outlier rejection method is introduced. After the calibration is performed, the sensor fusion framework obtains initial beliefs of the anchor positions and dictionaries of pairwise biases, in order to fuse range measurements obtained from new anchors tightly-coupled. The effectiveness of the filter and calibration framework has been validated through evaluations on a recorded dataset and real-world experiments.
A Passivity-Based Variable Impedance Controller for Incremental Learning of Periodic Interactive Tasks
Aug 20, 2024


In intelligent manufacturing, robots are asked to dynamically adapt their behaviours without reducing productivity. Human teaching, where an operator physically interacts with the robot to demonstrate a new task, is a promising strategy to quickly and intuitively reconfigure the production line. However, physical guidance during task execution poses challenges in terms of both operator safety and system usability. In this paper, we solve this issue by designing a variable impedance control strategy that regulates the interaction with the environment and the physical demonstrations, explicitly preventing at the same time passivity violations. We derive constraints to limit not only the exchanged energy with the environment but also the exchanged power, resulting in smoother interactions. By monitoring the energy flow between the robot and the environment, we are able to distinguish between disturbances (to be rejected) and physical guidance (to be accomplished), enabling smooth and controlled transitions from teaching to execution and vice versa. The effectiveness of the proposed approach is validated in wiping tasks with a real robotic manipulator.