 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReformulating AI-based Multi-Object Relative State Estimation for Aleatoric Uncertainty-based Outlier Rejection of Partial Measurements
Feb 02, 2026Precise localization with respect to a set of objects of interest enables mobile robots to perform various tasks. With the rise of edge devices capable of deploying deep neural networks (DNNs) for real-time inference, it stands to reason to use artificial intelligence (AI) for the extraction of object-specific, semantic information from raw image data, such as the object class and the relative six degrees of freedom (6-DoF) pose. However, fusing such AI-based measurements in an Extended Kalman Filter (EKF) requires quantifying the DNNs' uncertainty and outlier rejection capabilities. This paper presents the benefits of reformulating the measurement equation in AI-based, object-relative state estimation. By deriving an EKF using the direct object-relative pose measurement, we can decouple the position and rotation measurements, thus limiting the influence of erroneous rotation measurements and allowing partial measurement rejection. Furthermore, we investigate the performance and consistency improvements for state estimators provided by replacing the fixed measurement covariance matrix of the 6-DoF object-relative pose measurements with the predicted aleatoric uncertainty of the DNN.
Consistent Pose Estimation of Unmanned Ground Vehicles through Terrain-Aided Multi-Sensor Fusion on Geometric Manifolds
Aug 20, 2025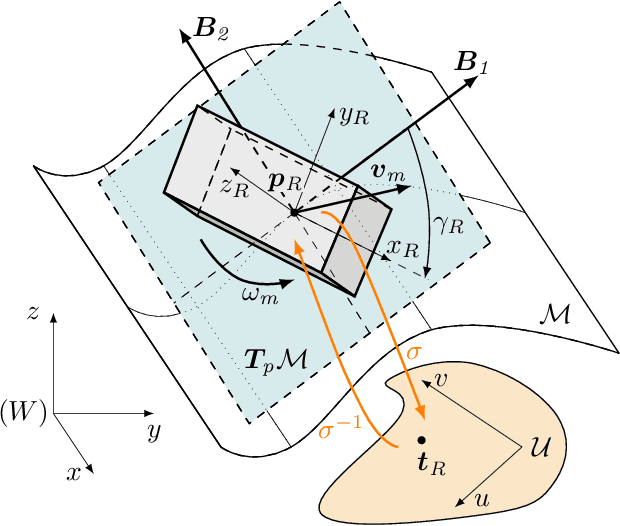
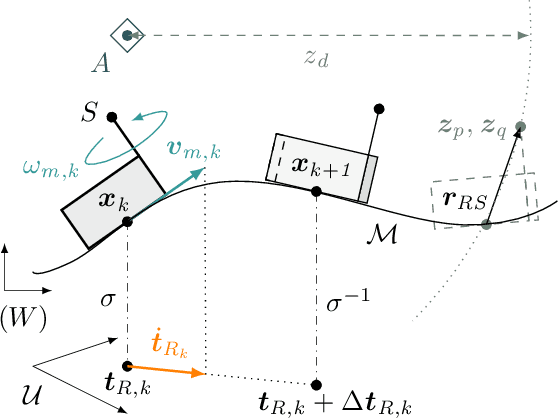
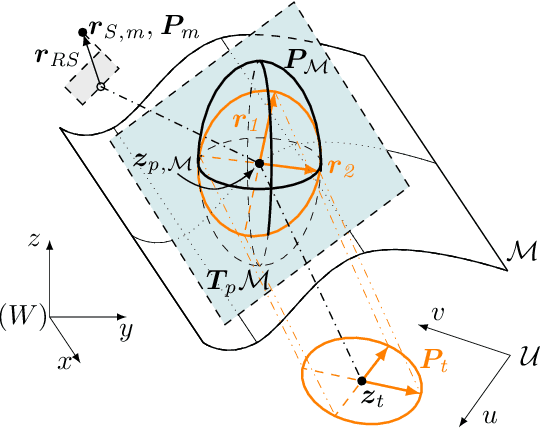
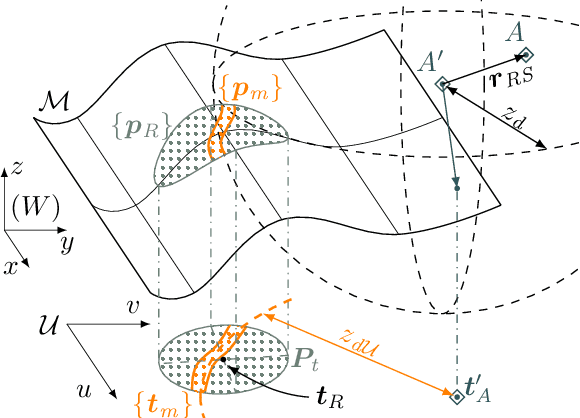
Aiming to enhance the consistency and thus long-term accuracy of Extended Kalman Filters for terrestrial vehicle localization, this paper introduces the Manifold Error State Extended Kalman Filter (M-ESEKF). By representing the robot's pose in a space with reduced dimensionality, the approach ensures feasible estimates on generic smooth surfaces, without introducing artificial constraints or simplifications that may degrade a filter's performance. The accompanying measurement models are compatible with common loosely- and tightly-coupled sensor modalities and also implicitly account for the ground geometry. We extend the formulation by introducing a novel correction scheme that embeds additional domain knowledge into the sensor data, giving more accurate uncertainty approximations and further enhancing filter consistency. The proposed estimator is seamlessly integrated into a validated modular state estimation framework, demonstrating compatibility with existing implementations. Extensive Monte Carlo simulations across diverse scenarios and dynamic sensor configurations show that the M-ESEKF outperforms classical filter formulations in terms of consistency and stability. Moreover, it eliminates the need for scenario-specific parameter tuning, enabling its application in a variety of real-world settings.
Real-Time Initialization of Unknown Anchors for UWB-aided Navigation
Jun 18, 2025This paper presents a framework for the real-time initialization of unknown Ultra-Wideband (UWB) anchors in UWB-aided navigation systems. The method is designed for localization solutions where UWB modules act as supplementary sensors. Our approach enables the automatic detection and calibration of previously unknown anchors during operation, removing the need for manual setup. By combining an online Positional Dilution of Precision (PDOP) estimation, a lightweight outlier detection method, and an adaptive robust kernel for non-linear optimization, our approach significantly improves robustness and suitability for real-world applications compared to state-of-the-art. In particular, we show that our metric which triggers an initialization decision is more conservative than current ones commonly based on initial linear or non-linear initialization guesses. This allows for better initialization geometry and subsequently lower initialization errors. We demonstrate the proposed approach on two different mobile robots: an autonomous forklift and a quadcopter equipped with a UWB-aided Visual-Inertial Odometry (VIO) framework. The results highlight the effectiveness of the proposed method with robust initialization and low positioning error. We open-source our code in a C++ library including a ROS wrapper.
Sensor Model Identification via Simultaneous Model Selection and State Variable Determination
Jun 12, 2025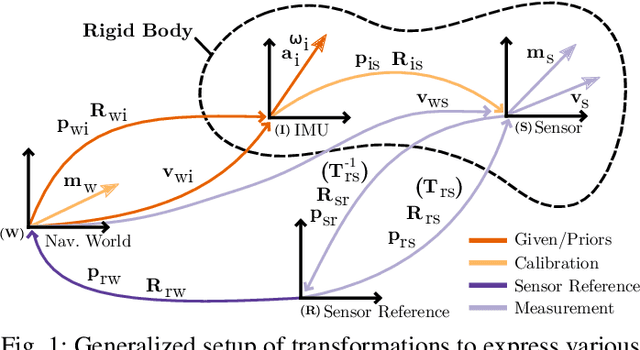
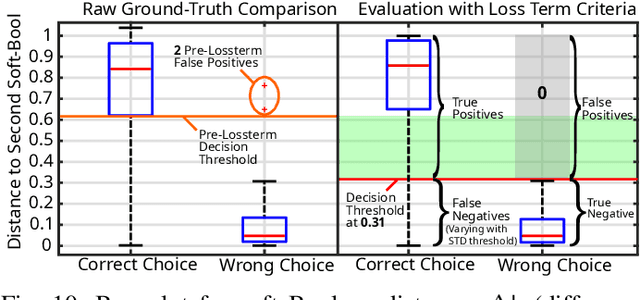
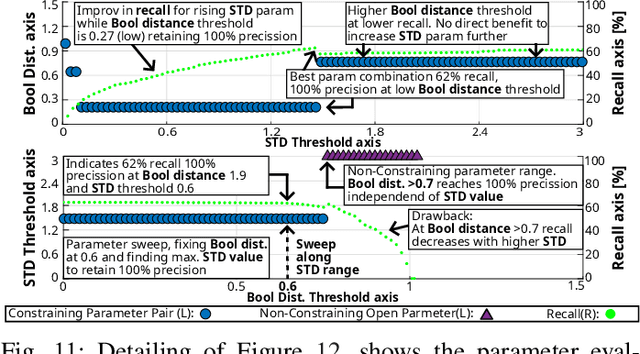
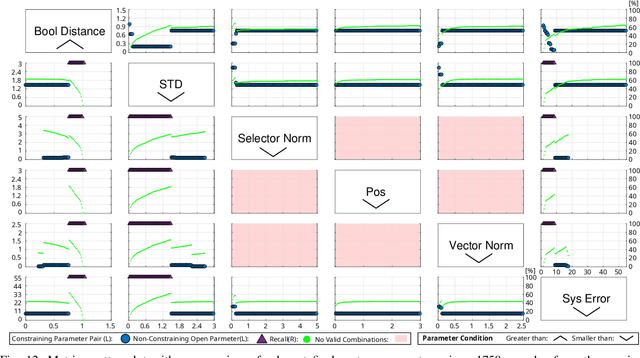
We present a method for the unattended gray-box identification of sensor models commonly used by localization algorithms in the field of robotics. The objective is to determine the most likely sensor model for a time series of unknown measurement data, given an extendable catalog of predefined sensor models. Sensor model definitions may require states for rigid-body calibrations and dedicated reference frames to replicate a measurement based on the robot's localization state. A health metric is introduced, which verifies the outcome of the selection process in order to detect false positives and facilitate reliable decision-making. In a second stage, an initial guess for identified calibration states is generated, and the necessity of sensor world reference frames is evaluated. The identified sensor model with its parameter information is then used to parameterize and initialize a state estimation application, thus ensuring a more accurate and robust integration of new sensor elements. This method is helpful for inexperienced users who want to identify the source and type of a measurement, sensor calibrations, or sensor reference frames. It will also be important in the field of modular multi-agent scenarios and modularized robotic platforms that are augmented by sensor modalities during runtime. Overall, this work aims to provide a simplified integration of sensor modalities to downstream applications and circumvent common pitfalls in the usage and development of localization approaches.
Autonomous Control of Redundant Hydraulic Manipulator Using Reinforcement Learning with Action Feedback
Apr 22, 2025This article presents an entirely data-driven approach for autonomous control of redundant manipulators with hydraulic actuation. The approach only requires minimal system information, which is inherited from a simulation model. The non-linear hydraulic actuation dynamics are modeled using actuator networks from the data gathered during the manual operation of the manipulator to effectively emulate the real system in a simulation environment. A neural network control policy for autonomous control, based on end-effector (EE) position tracking is then learned using Reinforcement Learning (RL) with Ornstein-Uhlenbeck process noise (OUNoise) for efficient exploration. The RL agent also receives feedback based on supervised learning of the forward kinematics which facilitates selecting the best suitable action from exploration. The control policy directly provides the joint variables as outputs based on provided target EE position while taking into account the system dynamics. The joint variables are then mapped to the hydraulic valve commands, which are then fed to the system without further modifications. The proposed approach is implemented on a scaled hydraulic forwarder crane with three revolute and one prismatic joint to track the desired position of the EE in 3-Dimensional (3D) space. With the emulated dynamics and extensive learning in simulation, the results demonstrate the feasibility of deploying the learned controller directly on the real system.
CaRoSaC: A Reinforcement Learning-Based Kinematic Control of Cable-Driven Parallel Robots by Addressing Cable Sag through Simulation
Apr 22, 2025This paper introduces the Cable Robot Simulation and Control (CaRoSaC) Framework, which integrates a simulation environment with a model-free reinforcement learning control methodology for suspended Cable-Driven Parallel Robots (CDPRs), accounting for cable sag. Our approach seeks to bridge the knowledge gap of the intricacies of CDPRs due to aspects such as cable sag and precision control necessities by establishing a simulation platform that captures the real-world behaviors of CDPRs, including the impacts of cable sag. The framework offers researchers and developers a tool to further develop estimation and control strategies within the simulation for understanding and predicting the performance nuances, especially in complex operations where cable sag can be significant. Using this simulation framework, we train a model-free control policy in Reinforcement Learning (RL). This approach is chosen for its capability to adaptively learn from the complex dynamics of CDPRs. The policy is trained to discern optimal cable control inputs, ensuring precise end-effector positioning. Unlike traditional feedback-based control methods, our RL control policy focuses on kinematic control and addresses the cable sag issues without being tethered to predefined mathematical models. We also demonstrate that our RL-based controller, coupled with the flexible cable simulation, significantly outperforms the classical kinematics approach, particularly in dynamic conditions and near the boundary regions of the workspace. The combined strength of the described simulation and control approach offers an effective solution in manipulating suspended CDPRs even at workspace boundary conditions where traditional approach fails, as proven from our experiments, ensuring that CDPRs function optimally in various applications while accounting for the often neglected but critical factor of cable sag.
Least-Squares Khatri-Rao Factorization of a Polynomial Matrix
Mar 29, 2025The Khatri-Rao product is extensively used in array processing, tensor decomposition, and multi-way data analysis. Many applications require a least-squares (LS) Khatri-Rao factorization. In broadband sensor array problems, polynomial matrices effectively model frequency-dependent behaviors, necessitating extensions of conventional linear algebra techniques. This paper generalizes LS Khatri-Rao factorization from ordinary to polynomial matrices by applying it to the discrete Fourier transform (DFT) samples of polynomial matrices. Phase coherence across bin-wise Khatri-Rao factors is ensured via a phasesmoothing algorithm. The proposed method is validated through broadband angle-of-arrival (AoA) estimation for uniform planar arrays (UPAs), where the steering matrix is a polynomial matrix, which can be represented as a Khatri-Rao product between steering matrix in azimuth and elevation directions.
Equivariant IMU Preintegration with Biases: a Galilean Group Approach
Nov 24, 2024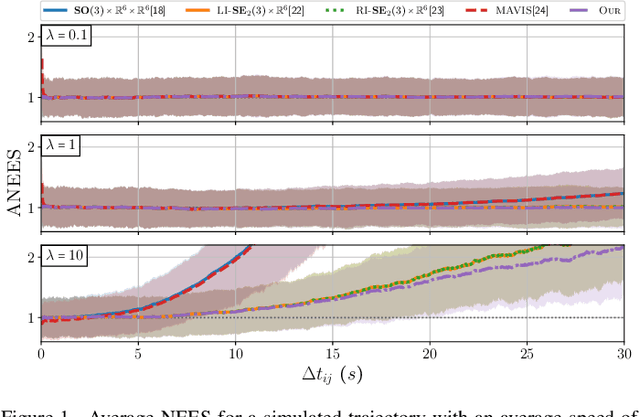
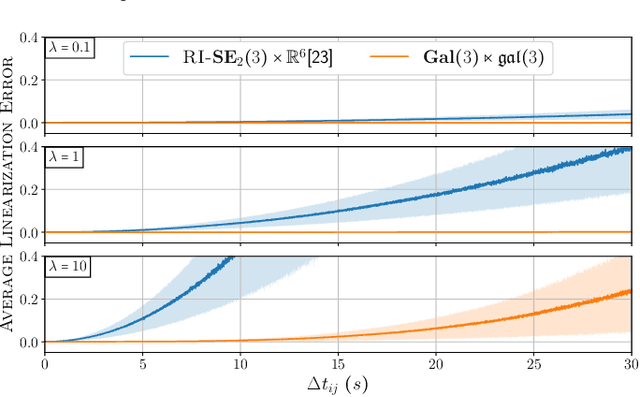
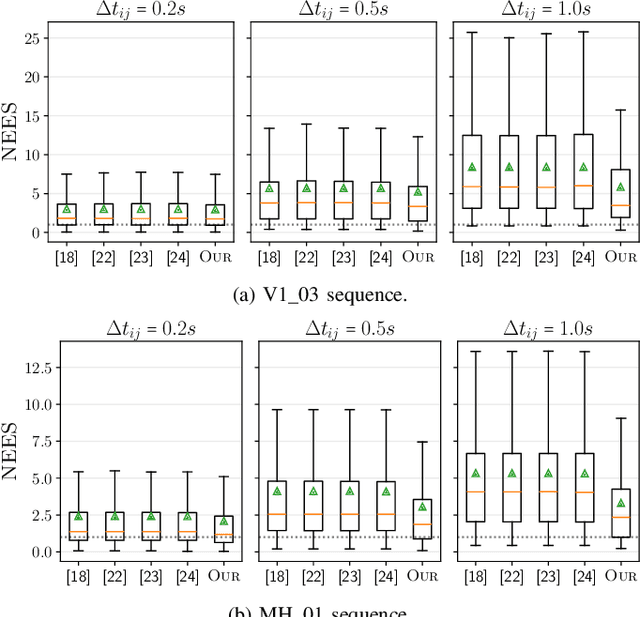
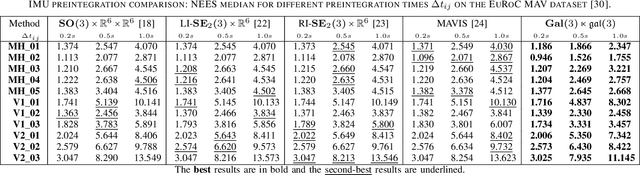
This letter proposes a new approach for Inertial Measurement Unit (IMU) preintegration, a fundamental building block that can be leveraged in different optimization-based Inertial Navigation System (INS) localization solutions. Inspired by recent advances in equivariant theory applied to biased INSs, we derive a discrete-time formulation of the IMU preintegration on ${\mathbf{Gal}(3) \ltimes \mathfrak{gal}(3)}$, the left-trivialization of the tangent group of the Galilean group $\mathbf{Gal}(3)$. We define a novel preintegration error that geometrically couples the navigation states and the bias leading to lower linearization error. Our method improves in consistency compared to existing preintegration approaches which treat IMU biases as a separate state-space. Extensive validation against state-of-the-art methods, both in simulation and with real-world IMU data, implementation in the Lie++ library, and open-source code are provided.
Equivariant IMU Preintegration with Biases: an Inhomogeneous Galilean Group Approach
Nov 08, 2024This letter proposes a new approach for Inertial Measurement Unit (IMU) preintegration, a fundamental building block that can be leveraged in different optimization-based Inertial Navigation System (INS) localization solutions. Inspired by recent advancements in equivariant theory applied to biased INSs, we derive a discrete-time formulation of the IMU preintegration on $\mathbf{G}(3) \ltimes \mathfrak{g}(3)$, the tangent group of the inhomogeneous Galilean group $\mathbf{G}(3)$. We define a novel preintegration error that geometrically couples the navigation states and the bias leading to lower linearization error. Our method improves in consistency compared to existing preintegration approaches which treat IMU biases as a separate state-space. Extensive validation against state-of-the-art methods, both in simulation and with real-world IMU data, implementation in the Lie++ library, and open-sourcing of the code are provided.
AIVIO: Closed-loop, Object-relative Navigation of UAVs with AI-aided Visual Inertial Odometry
Oct 08, 2024Object-relative mobile robot navigation is essential for a variety of tasks, e.g. autonomous critical infrastructure inspection, but requires the capability to extract semantic information about the objects of interest from raw sensory data. While deep learning-based (DL) methods excel at inferring semantic object information from images, such as class and relative 6 degree of freedom (6-DoF) pose, they are computationally demanding and thus often not suitable for payload constrained mobile robots. In this letter we present a real-time capable unmanned aerial vehicle (UAV) system for object-relative, closed-loop navigation with a minimal sensor configuration consisting of an inertial measurement unit (IMU) and RGB camera. Utilizing a DL-based object pose estimator, solely trained on synthetic data and optimized for companion board deployment, the object-relative pose measurements are fused with the IMU data to perform object-relative localization. We conduct multiple real-world experiments to validate the performance of our system for the challenging use case of power pole inspection. An example closed-loop flight is presented in the supplementary video.