 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReformulating AI-based Multi-Object Relative State Estimation for Aleatoric Uncertainty-based Outlier Rejection of Partial Measurements
Feb 02, 2026Precise localization with respect to a set of objects of interest enables mobile robots to perform various tasks. With the rise of edge devices capable of deploying deep neural networks (DNNs) for real-time inference, it stands to reason to use artificial intelligence (AI) for the extraction of object-specific, semantic information from raw image data, such as the object class and the relative six degrees of freedom (6-DoF) pose. However, fusing such AI-based measurements in an Extended Kalman Filter (EKF) requires quantifying the DNNs' uncertainty and outlier rejection capabilities. This paper presents the benefits of reformulating the measurement equation in AI-based, object-relative state estimation. By deriving an EKF using the direct object-relative pose measurement, we can decouple the position and rotation measurements, thus limiting the influence of erroneous rotation measurements and allowing partial measurement rejection. Furthermore, we investigate the performance and consistency improvements for state estimators provided by replacing the fixed measurement covariance matrix of the 6-DoF object-relative pose measurements with the predicted aleatoric uncertainty of the DNN.
Sensor Model Identification via Simultaneous Model Selection and State Variable Determination
Jun 12, 2025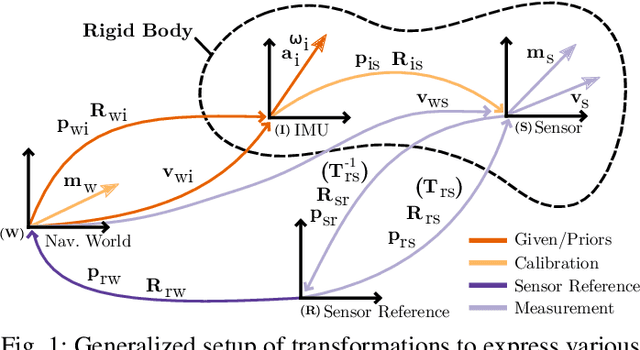
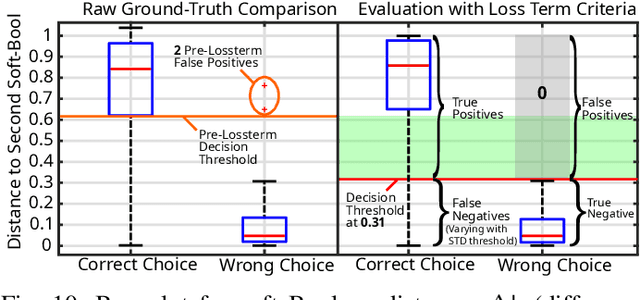
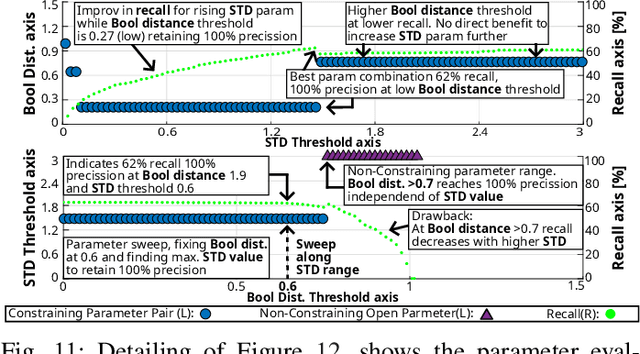
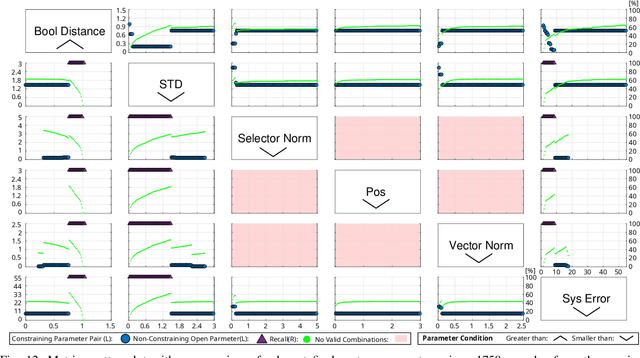
We present a method for the unattended gray-box identification of sensor models commonly used by localization algorithms in the field of robotics. The objective is to determine the most likely sensor model for a time series of unknown measurement data, given an extendable catalog of predefined sensor models. Sensor model definitions may require states for rigid-body calibrations and dedicated reference frames to replicate a measurement based on the robot's localization state. A health metric is introduced, which verifies the outcome of the selection process in order to detect false positives and facilitate reliable decision-making. In a second stage, an initial guess for identified calibration states is generated, and the necessity of sensor world reference frames is evaluated. The identified sensor model with its parameter information is then used to parameterize and initialize a state estimation application, thus ensuring a more accurate and robust integration of new sensor elements. This method is helpful for inexperienced users who want to identify the source and type of a measurement, sensor calibrations, or sensor reference frames. It will also be important in the field of modular multi-agent scenarios and modularized robotic platforms that are augmented by sensor modalities during runtime. Overall, this work aims to provide a simplified integration of sensor modalities to downstream applications and circumvent common pitfalls in the usage and development of localization approaches.
CaRoSaC: A Reinforcement Learning-Based Kinematic Control of Cable-Driven Parallel Robots by Addressing Cable Sag through Simulation
Apr 22, 2025This paper introduces the Cable Robot Simulation and Control (CaRoSaC) Framework, which integrates a simulation environment with a model-free reinforcement learning control methodology for suspended Cable-Driven Parallel Robots (CDPRs), accounting for cable sag. Our approach seeks to bridge the knowledge gap of the intricacies of CDPRs due to aspects such as cable sag and precision control necessities by establishing a simulation platform that captures the real-world behaviors of CDPRs, including the impacts of cable sag. The framework offers researchers and developers a tool to further develop estimation and control strategies within the simulation for understanding and predicting the performance nuances, especially in complex operations where cable sag can be significant. Using this simulation framework, we train a model-free control policy in Reinforcement Learning (RL). This approach is chosen for its capability to adaptively learn from the complex dynamics of CDPRs. The policy is trained to discern optimal cable control inputs, ensuring precise end-effector positioning. Unlike traditional feedback-based control methods, our RL control policy focuses on kinematic control and addresses the cable sag issues without being tethered to predefined mathematical models. We also demonstrate that our RL-based controller, coupled with the flexible cable simulation, significantly outperforms the classical kinematics approach, particularly in dynamic conditions and near the boundary regions of the workspace. The combined strength of the described simulation and control approach offers an effective solution in manipulating suspended CDPRs even at workspace boundary conditions where traditional approach fails, as proven from our experiments, ensuring that CDPRs function optimally in various applications while accounting for the often neglected but critical factor of cable sag.
Autonomous Control of Redundant Hydraulic Manipulator Using Reinforcement Learning with Action Feedback
Apr 22, 2025



This article presents an entirely data-driven approach for autonomous control of redundant manipulators with hydraulic actuation. The approach only requires minimal system information, which is inherited from a simulation model. The non-linear hydraulic actuation dynamics are modeled using actuator networks from the data gathered during the manual operation of the manipulator to effectively emulate the real system in a simulation environment. A neural network control policy for autonomous control, based on end-effector (EE) position tracking is then learned using Reinforcement Learning (RL) with Ornstein-Uhlenbeck process noise (OUNoise) for efficient exploration. The RL agent also receives feedback based on supervised learning of the forward kinematics which facilitates selecting the best suitable action from exploration. The control policy directly provides the joint variables as outputs based on provided target EE position while taking into account the system dynamics. The joint variables are then mapped to the hydraulic valve commands, which are then fed to the system without further modifications. The proposed approach is implemented on a scaled hydraulic forwarder crane with three revolute and one prismatic joint to track the desired position of the EE in 3-Dimensional (3D) space. With the emulated dynamics and extensive learning in simulation, the results demonstrate the feasibility of deploying the learned controller directly on the real system.
AIVIO: Closed-loop, Object-relative Navigation of UAVs with AI-aided Visual Inertial Odometry
Oct 08, 2024



Object-relative mobile robot navigation is essential for a variety of tasks, e.g. autonomous critical infrastructure inspection, but requires the capability to extract semantic information about the objects of interest from raw sensory data. While deep learning-based (DL) methods excel at inferring semantic object information from images, such as class and relative 6 degree of freedom (6-DoF) pose, they are computationally demanding and thus often not suitable for payload constrained mobile robots. In this letter we present a real-time capable unmanned aerial vehicle (UAV) system for object-relative, closed-loop navigation with a minimal sensor configuration consisting of an inertial measurement unit (IMU) and RGB camera. Utilizing a DL-based object pose estimator, solely trained on synthetic data and optimized for companion board deployment, the object-relative pose measurements are fused with the IMU data to perform object-relative localization. We conduct multiple real-world experiments to validate the performance of our system for the challenging use case of power pole inspection. An example closed-loop flight is presented in the supplementary video.
AI-Based Multi-Object Relative State Estimation with Self-Calibration Capabilities
Mar 01, 2023


The capability to extract task specific, semantic information from raw sensory data is a crucial requirement for many applications of mobile robotics. Autonomous inspection of critical infrastructure with Unmanned Aerial Vehicles (UAVs), for example, requires precise navigation relative to the structure that is to be inspected. Recently, Artificial Intelligence (AI)-based methods have been shown to excel at extracting semantic information such as 6 degree-of-freedom (6-DoF) poses of objects from images. In this paper, we propose a method combining a state-of-the-art AI-based pose estimator for objects in camera images with data from an inertial measurement unit (IMU) for 6-DoF multi-object relative state estimation of a mobile robot. The AI-based pose estimator detects multiple objects of interest in camera images along with their relative poses. These measurements are fused with IMU data in a state-of-the-art sensor fusion framework. We illustrate the feasibility of our proposed method with real world experiments for different trajectories and number of arbitrarily placed objects. We show that the results can be reliably reproduced due to the self-calibrating capabilities of our approach.
PoET: Pose Estimation Transformer for Single-View, Multi-Object 6D Pose Estimation
Nov 25, 2022



Accurate 6D object pose estimation is an important task for a variety of robotic applications such as grasping or localization. It is a challenging task due to object symmetries, clutter and occlusion, but it becomes more challenging when additional information, such as depth and 3D models, is not provided. We present a transformer-based approach that takes an RGB image as input and predicts a 6D pose for each object in the image. Besides the image, our network does not require any additional information such as depth maps or 3D object models. First, the image is passed through an object detector to generate feature maps and to detect objects. Then, the feature maps are fed into a transformer with the detected bounding boxes as additional information. Afterwards, the output object queries are processed by a separate translation and rotation head. We achieve state-of-the-art results for RGB-only approaches on the challenging YCB-V dataset. We illustrate the suitability of the resulting model as pose sensor for a 6-DoF state estimation task. Code is available at https://github.com/aau-cns/poet.
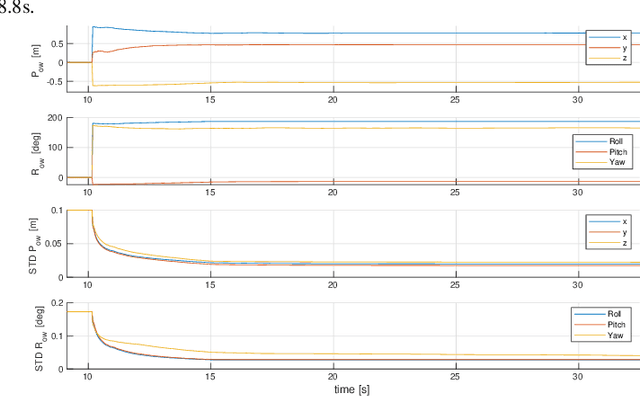
INSANE: Cross-Domain UAV Data Sets with Increased Number of Sensors for developing Advanced and Novel Estimators
Oct 17, 2022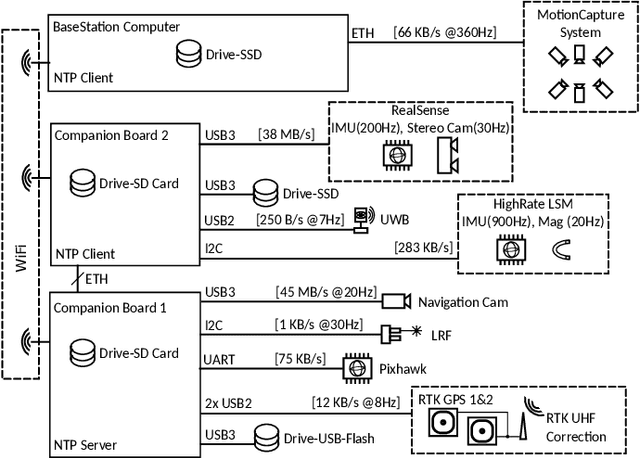
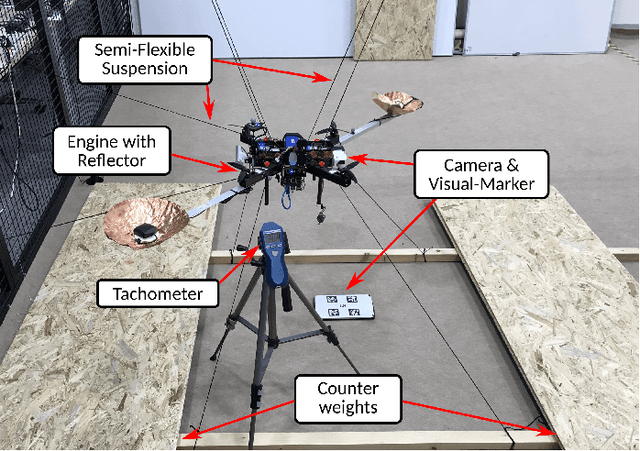
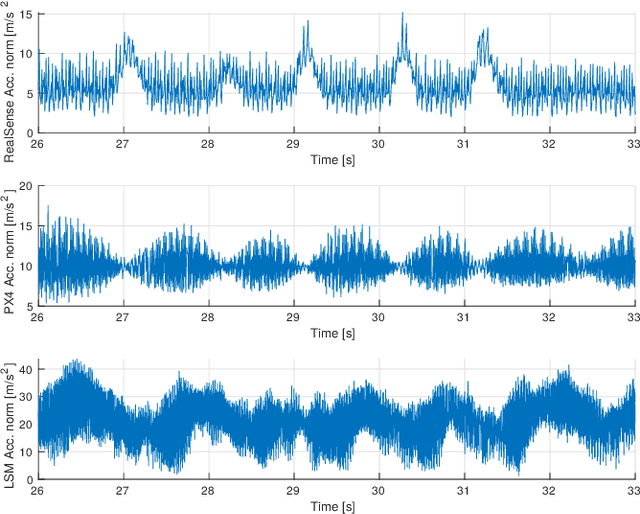
For real-world applications, autonomous mobile robotic platforms must be capable of navigating safely in a multitude of different and dynamic environments with accurate and robust localization being a key prerequisite. To support further research in this domain, we present the INSANE data sets - a collection of versatile Micro Aerial Vehicle (MAV) data sets for cross-environment localization. The data sets provide various scenarios with multiple stages of difficulty for localization methods. These scenarios range from trajectories in the controlled environment of an indoor motion capture facility, to experiments where the vehicle performs an outdoor maneuver and transitions into a building, requiring changes of sensor modalities, up to purely outdoor flight maneuvers in a challenging Mars analog environment to simulate scenarios which current and future Mars helicopters would need to perform. The presented work aims to provide data that reflects real-world scenarios and sensor effects. The extensive sensor suite includes various sensor categories, including multiple Inertial Measurement Units (IMUs) and cameras. Sensor data is made available as raw measurements and each data set provides highly accurate ground truth, including the outdoor experiments where a dual Real-Time Kinematic (RTK) Global Navigation Satellite System (GNSS) setup provides sub-degree and centimeter accuracy (1-sigma). The sensor suite also includes a dedicated high-rate IMU to capture all the vibration dynamics of the vehicle during flight to support research on novel machine learning-based sensor signal enhancement methods for improved localization. The data sets and post-processing tools are available at: https://sst.aau.at/cns/datasets
Variational Inference to Measure Model Uncertainty in Deep Neural Networks
Mar 08, 2019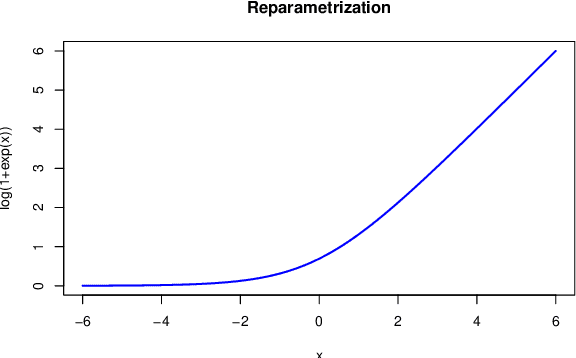
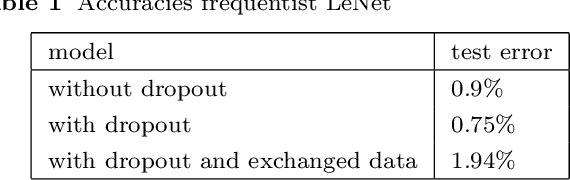
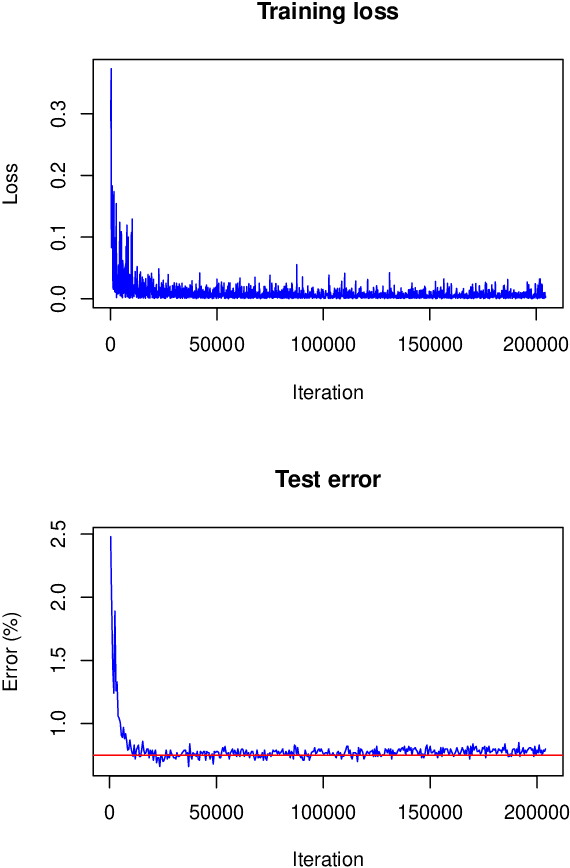
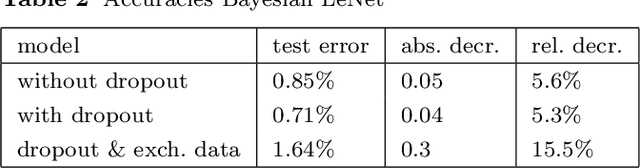
We present a novel approach for training deep neural networks in a Bayesian way. Classical, i.e. non-Bayesian, deep learning has two major drawbacks both originating from the fact that network parameters are considered to be deterministic. First, model uncertainty cannot be measured thus limiting the use of deep learning in many fields of application and second, training of deep neural networks is often hampered by overfitting. The proposed approach uses variational inference to approximate the intractable a posteriori distribution on basis of a normal prior. The variational density is designed in such a way that the a posteriori uncertainty of the network parameters is represented per network layer and depending on the estimated parameter expectation values. This way, only a few additional parameters need to be optimized compared to a non-Bayesian network. We apply this Bayesian approach to train and test the LeNet architecture on the MNIST dataset. Compared to classical deep learning, the test error is reduced by 15%. In addition, the trained model contains information about the parameter uncertainty in each layer. We show that this information can be used to calculate credible intervals for the prediction and to optimize the network architecture for a given training data set.