 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeINSANE: Cross-Domain UAV Data Sets with Increased Number of Sensors for developing Advanced and Novel Estimators
Oct 17, 2022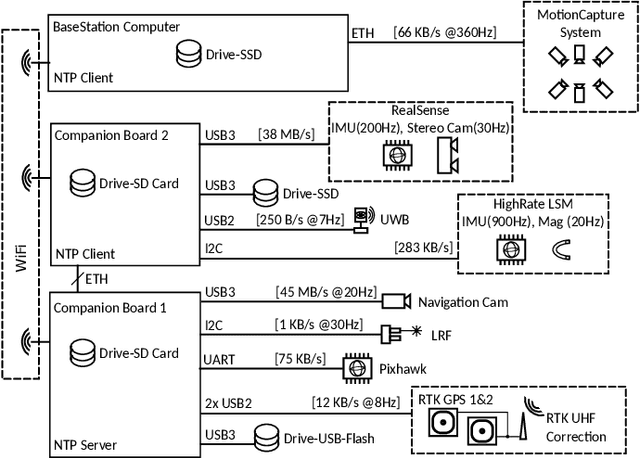
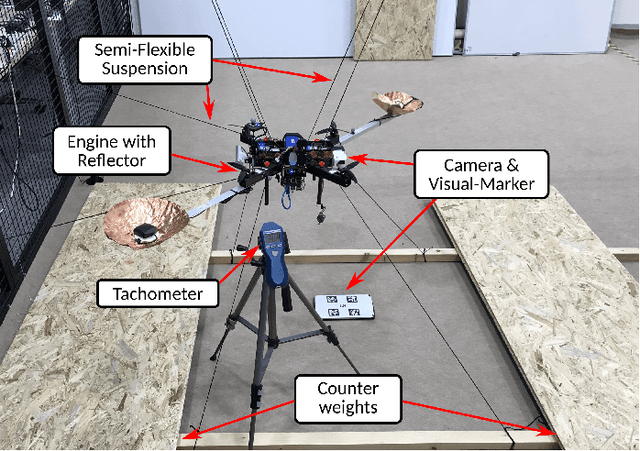
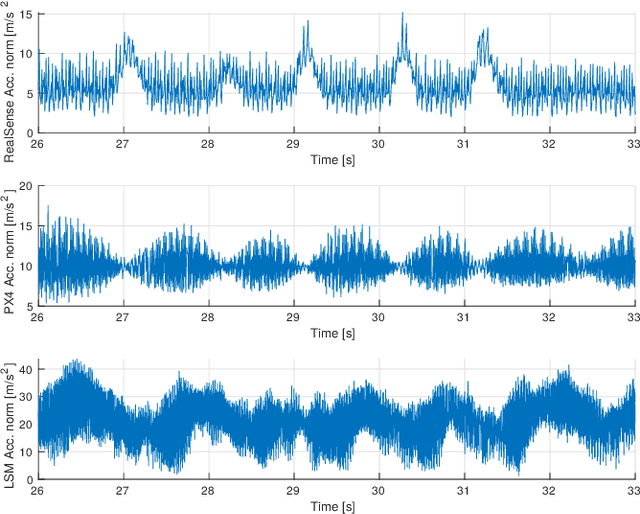
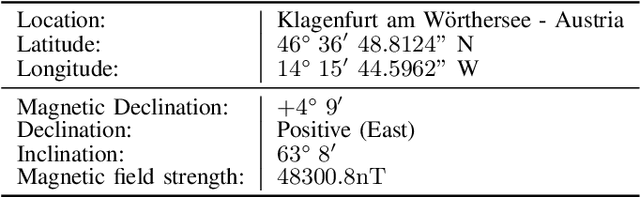
For real-world applications, autonomous mobile robotic platforms must be capable of navigating safely in a multitude of different and dynamic environments with accurate and robust localization being a key prerequisite. To support further research in this domain, we present the INSANE data sets - a collection of versatile Micro Aerial Vehicle (MAV) data sets for cross-environment localization. The data sets provide various scenarios with multiple stages of difficulty for localization methods. These scenarios range from trajectories in the controlled environment of an indoor motion capture facility, to experiments where the vehicle performs an outdoor maneuver and transitions into a building, requiring changes of sensor modalities, up to purely outdoor flight maneuvers in a challenging Mars analog environment to simulate scenarios which current and future Mars helicopters would need to perform. The presented work aims to provide data that reflects real-world scenarios and sensor effects. The extensive sensor suite includes various sensor categories, including multiple Inertial Measurement Units (IMUs) and cameras. Sensor data is made available as raw measurements and each data set provides highly accurate ground truth, including the outdoor experiments where a dual Real-Time Kinematic (RTK) Global Navigation Satellite System (GNSS) setup provides sub-degree and centimeter accuracy (1-sigma). The sensor suite also includes a dedicated high-rate IMU to capture all the vibration dynamics of the vehicle during flight to support research on novel machine learning-based sensor signal enhancement methods for improved localization. The data sets and post-processing tools are available at: https://sst.aau.at/cns/datasets
Optimizing Terrain Mapping and Landing Site Detection for Autonomous UAVs
May 07, 2022



The next generation of Mars rotorcrafts requires on-board autonomous hazard avoidance landing. To this end, this work proposes a system that performs continuous multi-resolution height map reconstruction and safe landing spot detection. Structure-from-Motion measurements are aggregated in a pyramid structure using a novel Optimal Mixture of Gaussians formulation that provides a comprehensive uncertainty model. Our multiresolution pyramid is built more efficiently and accurately than past work by decoupling pyramid filling from the measurement updates of different resolutions. To detect the safest landing location, after an optimized hazard segmentation, we use a mean shift algorithm on multiple distance transform peaks to account for terrain roughness and uncertainty. The benefits of our contributions are evaluated on real and synthetic flight data.
Mid-Air Helicopter Delivery at Mars Using a Jetpack
Mar 07, 2022
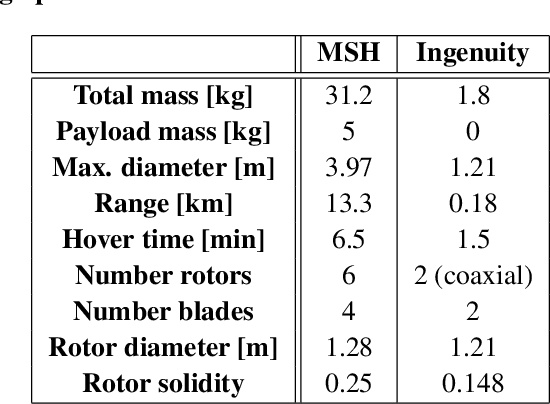
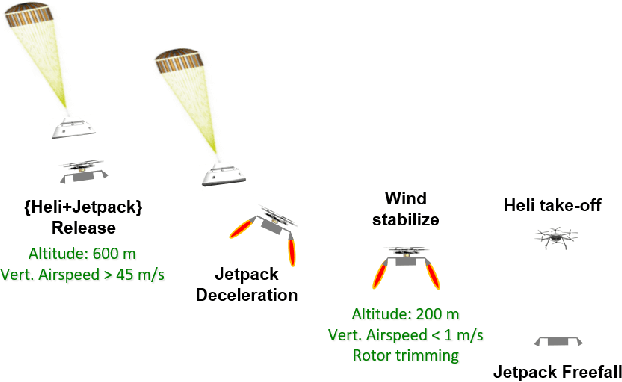
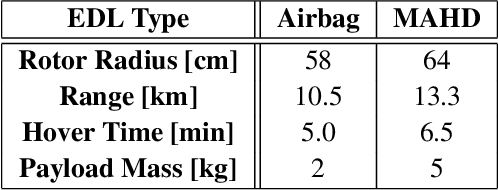
Mid-Air Helicopter Delivery (MAHD) is a new Entry, Descent and Landing (EDL) architecture to enable in situ mobility for Mars science at lower cost than previous missions. It uses a jetpack to slow down a Mars Science Helicopter (MSH) after separation from the backshell, and reach aerodynamic conditions suitable for helicopter take-off in mid air. For given aeroshell dimensions, only MAHD's lander-free approach leaves enough room in the aeroshell to accommodate the largest rotor option for MSH. This drastically improves flight performance, notably allowing +150\% increased science payload mass. Compared to heritage EDL approaches, the simpler MAHD architecture is also likely to reduce cost, and enables access to more hazardous and higher-elevation terrains on Mars. This paper introduces a design for the MAHD system architecture and operations. We present a mechanical configuration that fits both MSH and the jetpack within the 2.65-m Mars heritage aeroshell, and a jetpack control architecture which fully leverages the available helicopter avionics. We discuss preliminary numerical models of the flow dynamics resulting from the interaction between the jets, the rotors and the side winds. We define a force-torque sensing architecture capable of handling the wind and trimming the rotors to prepare for safe take-off. Finally, we analyze the dynamic environment and closed-loop control simulation results to demonstrate the preliminary feasibility of MAHD.
Multi-Resolution Elevation Mapping and Safe Landing Site Detection with Applications to Planetary Rotorcraft
Nov 11, 2021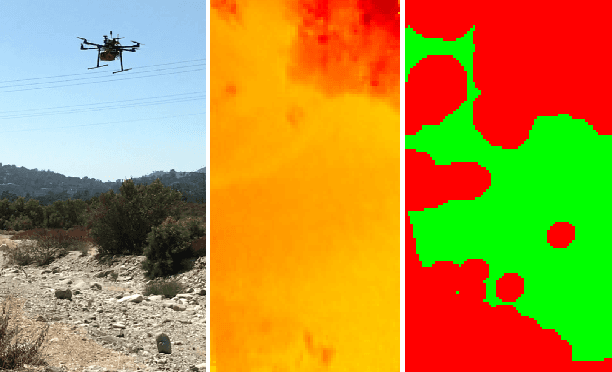
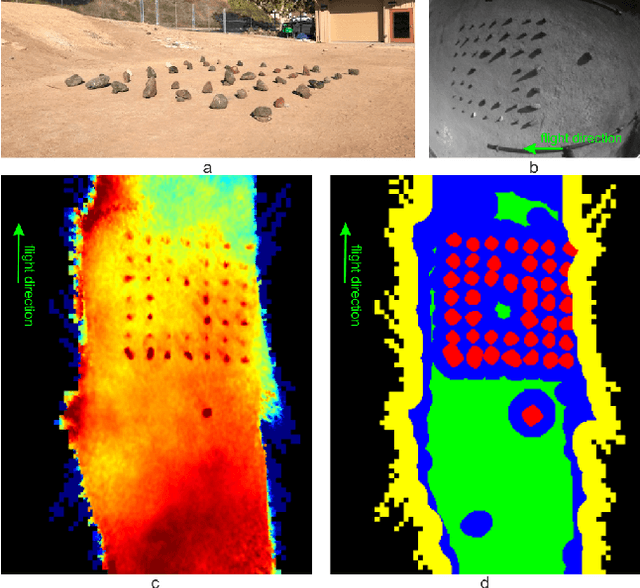
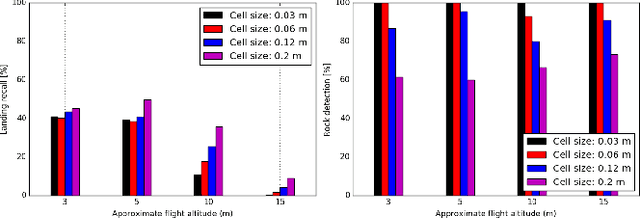
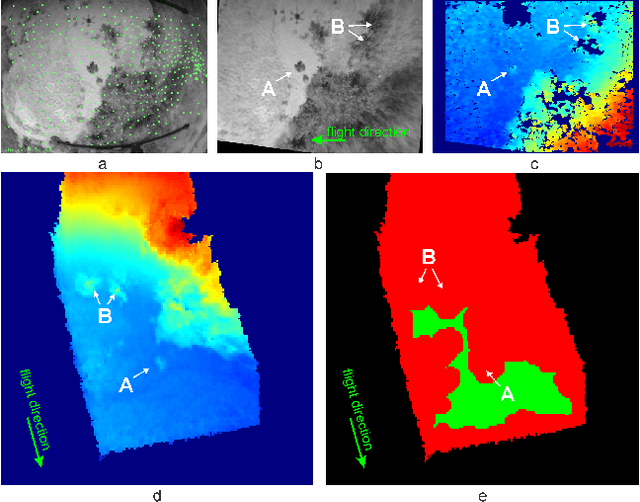
In this paper, we propose a resource-efficient approach to provide an autonomous UAV with an on-board perception method to detect safe, hazard-free landing sites during flights over complex 3D terrain. We aggregate 3D measurements acquired from a sequence of monocular images by a Structure-from-Motion approach into a local, robot-centric, multi-resolution elevation map of the overflown terrain, which fuses depth measurements according to their lateral surface resolution (pixel-footprint) in a probabilistic framework based on the concept of dynamic Level of Detail. Map aggregation only requires depth maps and the associated poses, which are obtained from an onboard Visual Odometry algorithm. An efficient landing site detection method then exploits the features of the underlying multi-resolution map to detect safe landing sites based on slope, roughness, and quality of the reconstructed terrain surface. The evaluation of the performance of the mapping and landing site detection modules are analyzed independently and jointly in simulated and real-world experiments in order to establish the efficacy of the proposed approach.
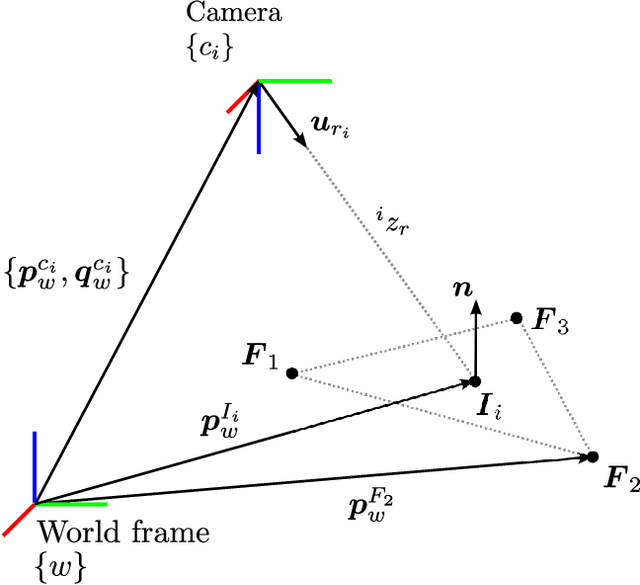
Range-Visual-Inertial Odometry: Scale Observability Without Excitation
Mar 28, 2021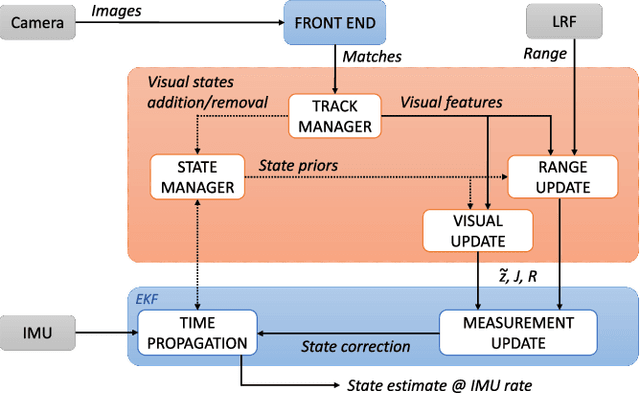
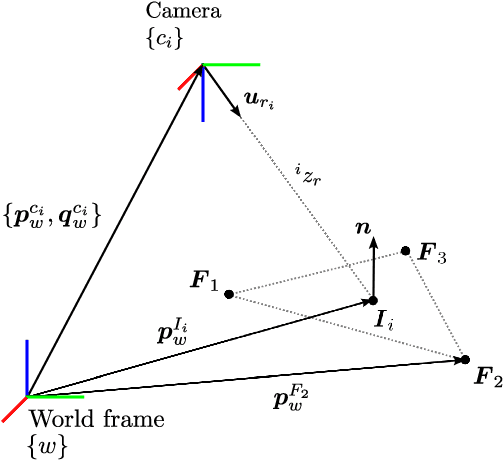


Traveling at constant velocity is the most efficient trajectory for most robotics applications. Unfortunately without accelerometer excitation, monocular Visual-Inertial Odometry (VIO) cannot observe scale and suffers severe error drift. This was the main motivation for incorporating a 1D laser range finder in the navigation system for NASA's Ingenuity Mars Helicopter. However, Ingenuity's simplified approach was limited to flat terrains. The current paper introduces a novel range measurement update model based on using facet constraints. The resulting range-VIO approach is no longer limited to flat scenes, but extends to any arbitrary structure for generic robotic applications. An important theoretical result shows that scale is no longer in the right nullspace of the observability matrix for zero or constant acceleration motion. In practical terms, this means that scale becomes observable under constant-velocity motion, which enables simple and robust autonomous operations over arbitrary terrain. Due to the small range finder footprint, range-VIO retains the minimal size, weight, and power attributes of VIO, with similar runtime. The benefits are evaluated on real flight data representative of common aerial robotics scenarios. Robustness is demonstrated using indoor stress data and fullstate ground truth. We release our software framework, called xVIO, as open source.
xVIO: A Range-Visual-Inertial Odometry Framework
Oct 13, 2020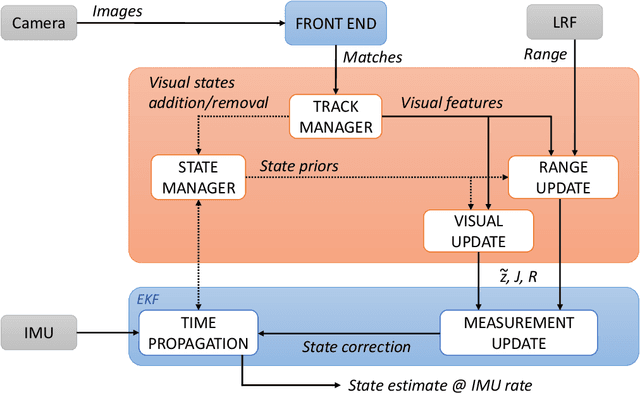
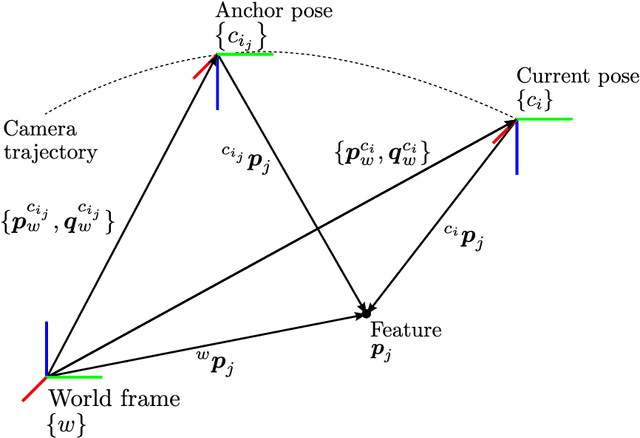
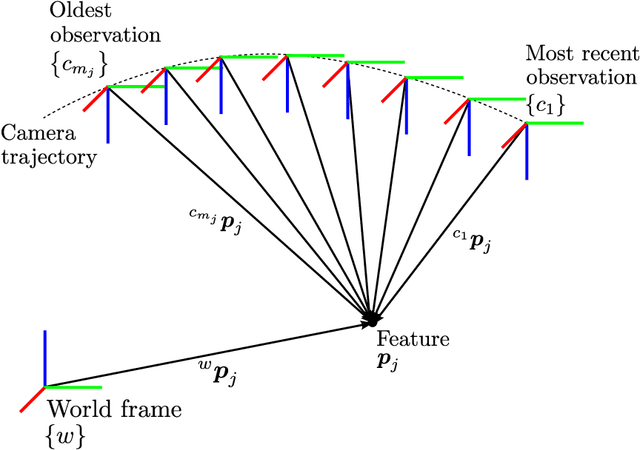
xVIO is a range-visual-inertial odometry algorithm implemented at JPL. It has been demonstrated with closed-loop controls on-board unmanned rotorcraft equipped with off-the-shelf embedded computers and sensors. It can operate at daytime with visible-spectrum cameras, or at night time using thermal infrared cameras. This report is a complete technical description of xVIO. It includes an overview of the system architecture, the implementation of the navigation filter, along with the derivations of the Jacobian matrices which are not already published in the literature.
Long-Duration Fully Autonomous Operation of Rotorcraft Unmanned Aerial Systems for Remote-Sensing Data Acquisition
Aug 18, 2019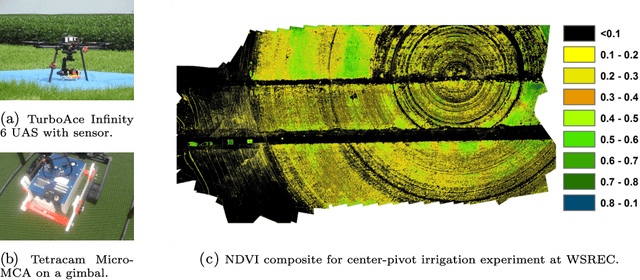
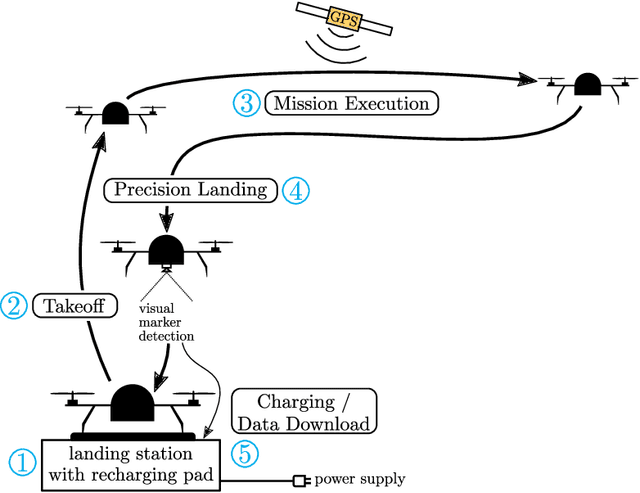
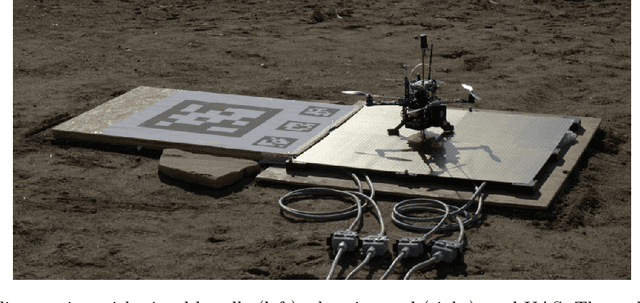
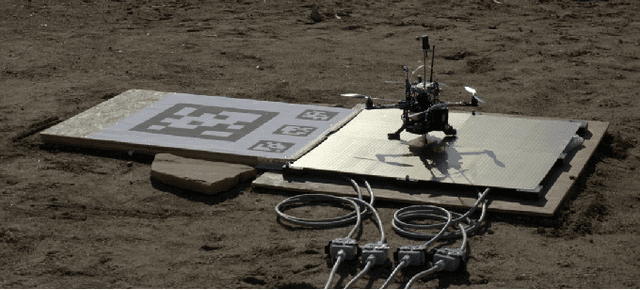
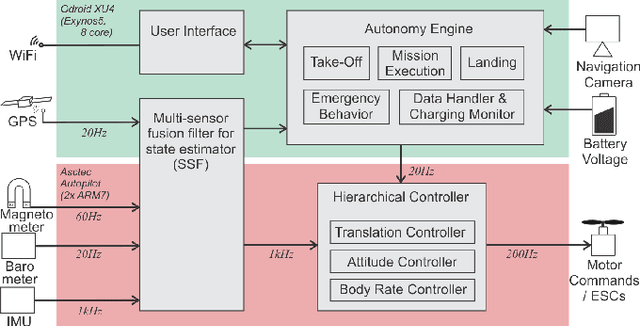
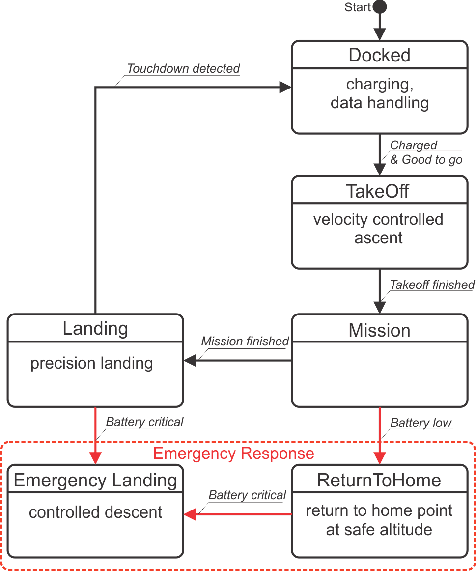
Recent applications of unmanned aerial systems (UAS) to precision agriculture have shown increased ease and efficiency in data collection at precise remote locations. However, further enhancement of the field requires operation over long periods of time, e.g. days or weeks. This has so far been impractical due to the limited flight times of such platforms and the requirement of humans in the loop for operation. To overcome these limitations, we propose a fully autonomous rotorcraft UAS that is capable of performing repeated flights for long-term observation missions without any human intervention. We address two key technologies that are critical for such a system: full platform autonomy to enable mission execution independently from human operators and the ability of vision-based precision landing on a recharging station for automated energy replenishment. High-level autonomous decision making is implemented as a hierarchy of master and slave state machines. Vision-based precision landing is enabled by estimating the landing pad's pose using a bundle of AprilTag fiducials configured for detection from a wide range of altitudes. We provide an extensive evaluation of the landing pad pose estimation accuracy as a function of the bundle's geometry. The functionality of the complete system is demonstrated through two indoor experiments with a duration of 11 and 10.6 hours, and one outdoor experiment with a duration of 4 hours. The UAS executed 16, 48 and 22 flights respectively during these experiments. In the outdoor experiment, the ratio between flying to collect data and charging was 1 to 10, which is similar to past work in this domain. All flights were fully autonomous with no human in the loop. To our best knowledge this is the first research publication about the long-term outdoor operation of a quadrotor system with no human interaction.
* 38 pages, 28 figures
Disturbance Estimation and Rejection for High-Precision Multirotor Position Control
Aug 08, 2019

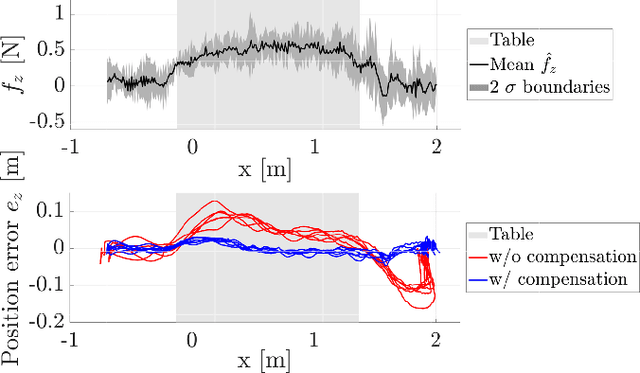
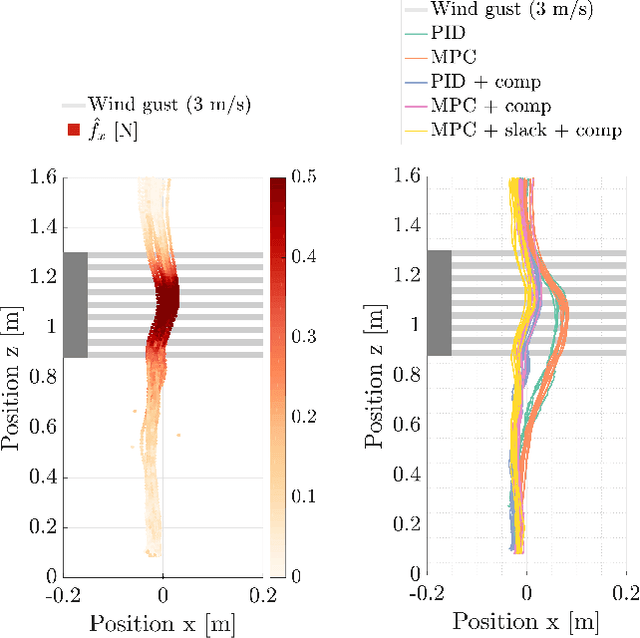
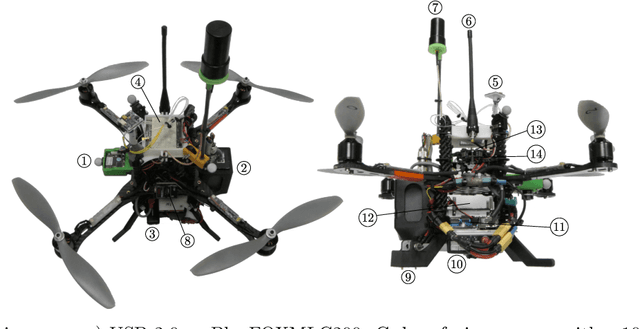
Many multirotor Unmanned Aerial Systems applications have a critical need for precise position control in environments with strong dynamic external disturbances such as wind gusts or ground and wall effects. Moreover, to maximize flight time, small multirotor platforms have to operate within strict constraints on payload and thus computational performance. In this paper, we present the design and experimental comparison of Model Predictive and PID multirotor position controllers augmented with a disturbance estimator to reject strong wind gusts up to 12 m/s and ground effect. For disturbance estimation, we compare Extended and Unscented Kalman filtering. In extensive in- and outdoor flight tests, we evaluate the suitability of the developed control and estimation algorithms to run on a computationally constrained platform. This allows to draw a conclusion on whether potential performance improvements justify the increased computational complexity of MPC for multirotor position control and UKF for disturbance estimation.
Long-Duration Autonomy for Small Rotorcraft UAS including Recharging
Oct 12, 2018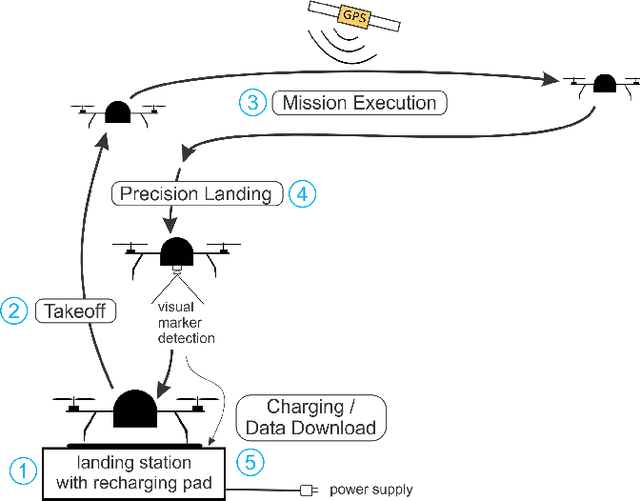
Many unmanned aerial vehicle surveillance and monitoring applications require observations at precise locations over long periods of time, ideally days or weeks at a time (e.g. ecosystem monitoring), which has been impractical due to limited endurance and the requirement of humans in the loop for operation. To overcome these limitations, we propose a fully autonomous small rotorcraft UAS that is capable of performing repeated sorties for long-term observation missions without any human intervention. We address two key technologies that are critical for such a system: full platform autonomy including emergency response to enable mission execution independently from human operators, and the ability of vision-based precision landing on a recharging station for automated energy replenishment. Experimental results of up to 11 hours of fully autonomous operation in indoor and outdoor environments illustrate the capability of our system.