 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuided Policy Search using Sequential Convex Programming for Initialization of Trajectory Optimization Algorithms
Oct 13, 2021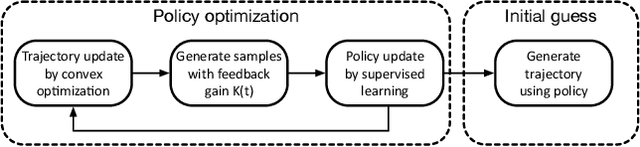

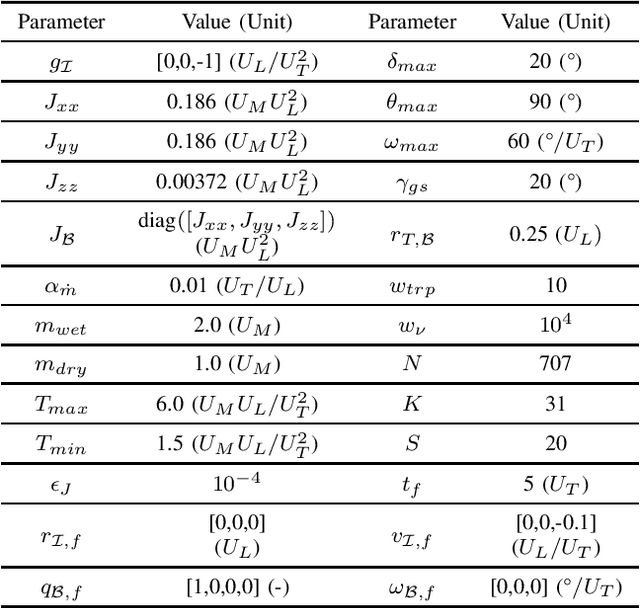
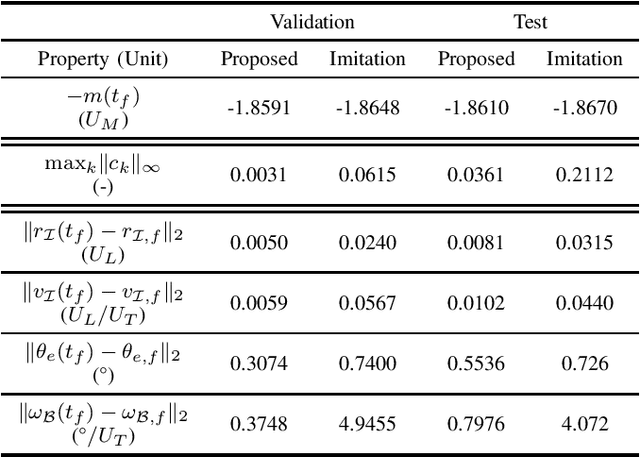
Nonlinear trajectory optimization algorithms have been developed to handle optimal control problems with nonlinear dynamics and nonconvex constraints in trajectory planning. The performance and computational efficiency of many trajectory optimization methods are sensitive to the initial guess, i.e., the trajectory guess needed by the recursive trajectory optimization algorithm. Motivated by this observation, we tackle the initialization problem for trajectory optimization via policy optimization. To optimize a policy, we propose a guided policy search method that has two key components: i) Trajectory update; ii) Policy update. The trajectory update involves offline solutions of a large number of trajectory optimization problems from different initial states via Sequential Convex Programming (SCP). Here we take a single SCP step to generate the trajectory iterate for each problem. In conjunction with these iterates, we also generate additional trajectories around each iterate via a feedback control law. Then all these trajectories are used by a stochastic gradient descent algorithm to update the neural network policy, i.e., the policy update step. As a result, the trained policy makes it possible to generate trajectory candidates that are close to the optimality and feasibility and that provide excellent initial guesses for the trajectory optimization methods. We validate the proposed method via a real-world 6-degree-of-freedom powered descent guidance problem for a reusable rocket.
Advances in Trajectory Optimization for Space Vehicle Control
Aug 23, 2021



Space mission design places a premium on cost and operational efficiency. The search for new science and life beyond Earth calls for spacecraft that can deliver scientific payloads to geologically rich yet hazardous landing sites. At the same time, the last four decades of optimization research have put a suite of powerful optimization tools at the fingertips of the controls engineer. As we enter the new decade, optimization theory, algorithms, and software tooling have reached a critical mass to start seeing serious application in space vehicle guidance and control systems. This survey paper provides a detailed overview of recent advances, successes, and promising directions for optimization-based space vehicle control. The considered applications include planetary landing, rendezvous and proximity operations, small body landing, constrained attitude reorientation, endo-atmospheric flight including ascent and reentry, and orbit transfer and injection. The primary focus is on the last ten years of progress, which have seen a veritable rise in the number of applications using three core technologies: lossless convexification, sequential convex programming, and model predictive control. The reader will come away with a well-rounded understanding of the state-of-the-art in each space vehicle control application, and will be well positioned to tackle important current open problems using convex optimization as a core technology.
Convex Optimization for Trajectory Generation
Jun 16, 2021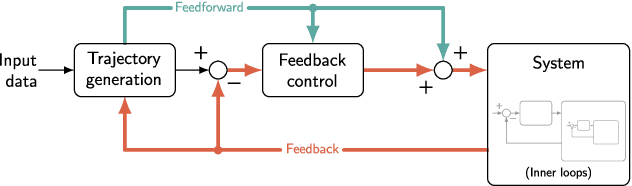
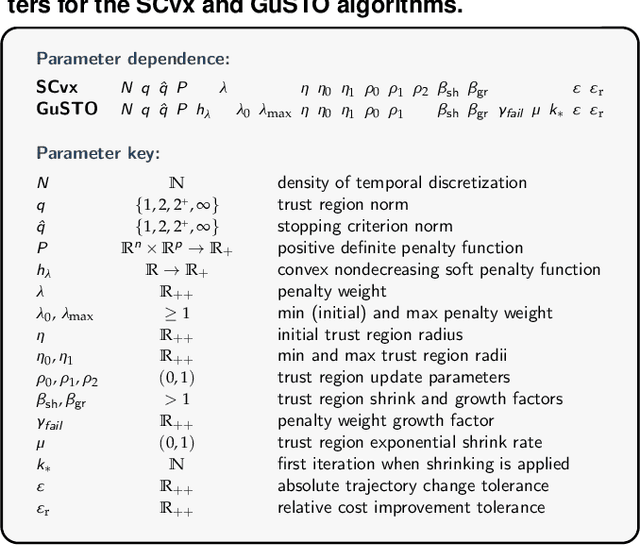

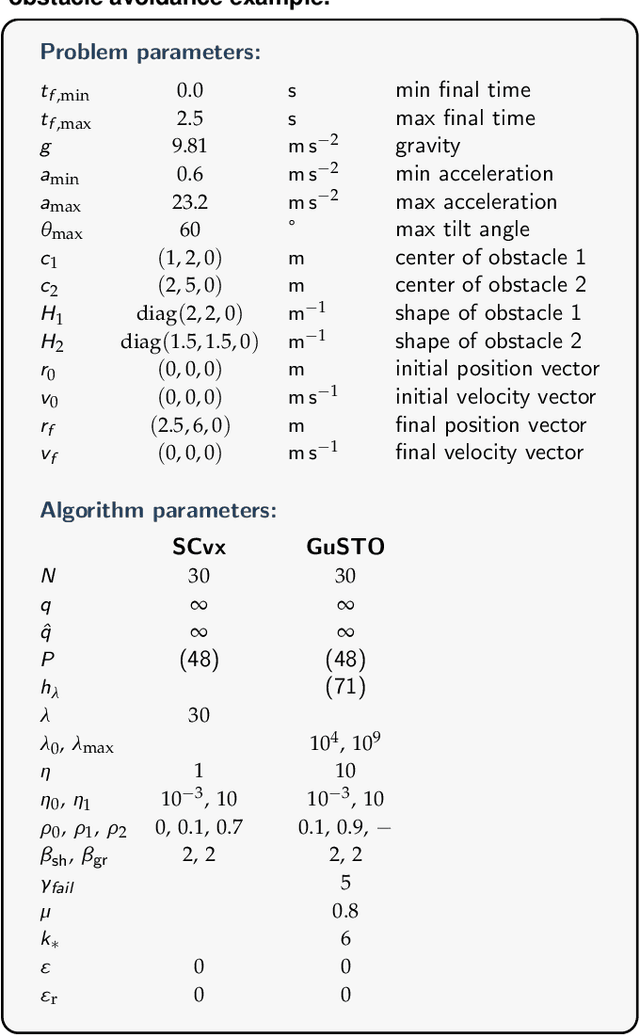
Reliable and efficient trajectory generation methods are a fundamental need for autonomous dynamical systems of tomorrow. The goal of this article is to provide a comprehensive tutorial of three major convex optimization-based trajectory generation methods: lossless convexification (LCvx), and two sequential convex programming algorithms known as SCvx and GuSTO. In this article, trajectory generation is the computation of a dynamically feasible state and control signal that satisfies a set of constraints while optimizing key mission objectives. The trajectory generation problem is almost always nonconvex, which typically means that it is not readily amenable to efficient and reliable solution onboard an autonomous vehicle. The three algorithms that we discuss use problem reformulation and a systematic algorithmic strategy to nonetheless solve nonconvex trajectory generation tasks through the use of a convex optimizer. The theoretical guarantees and computational speed offered by convex optimization have made the algorithms popular in both research and industry circles. To date, the list of applications includes rocket landing, spacecraft hypersonic reentry, spacecraft rendezvous and docking, aerial motion planning for fixed-wing and quadrotor vehicles, robot motion planning, and more. Among these applications are high-profile rocket flights conducted by organizations like NASA, Masten Space Systems, SpaceX, and Blue Origin. This article aims to give the reader the tools and understanding necessary to work with each algorithm, and to know what each method can and cannot do. A publicly available source code repository supports the provided numerical examples. By the end of the article, the reader should be ready to use the methods, to extend them, and to contribute to their many exciting modern applications.
Long-Duration Fully Autonomous Operation of Rotorcraft Unmanned Aerial Systems for Remote-Sensing Data Acquisition
Aug 18, 2019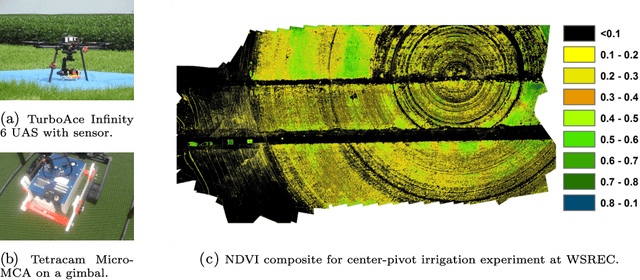
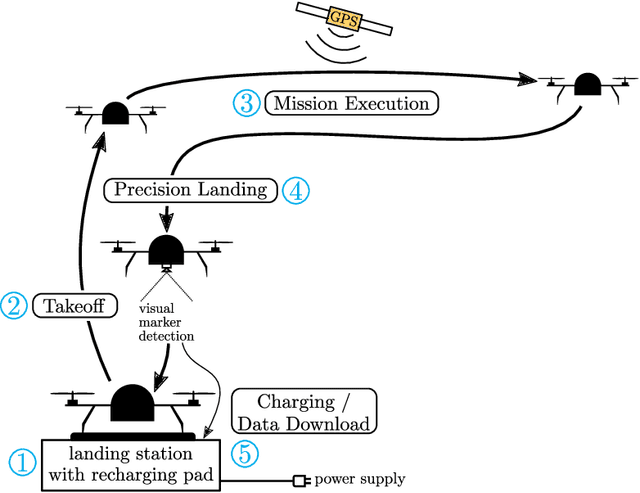
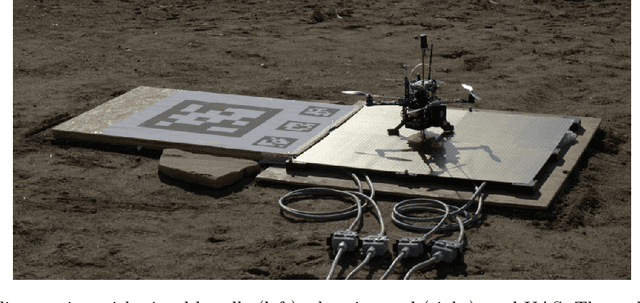
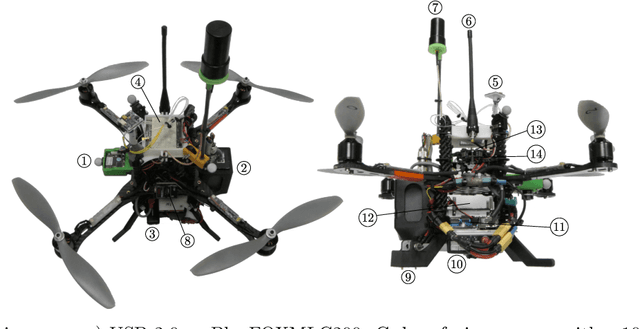
Recent applications of unmanned aerial systems (UAS) to precision agriculture have shown increased ease and efficiency in data collection at precise remote locations. However, further enhancement of the field requires operation over long periods of time, e.g. days or weeks. This has so far been impractical due to the limited flight times of such platforms and the requirement of humans in the loop for operation. To overcome these limitations, we propose a fully autonomous rotorcraft UAS that is capable of performing repeated flights for long-term observation missions without any human intervention. We address two key technologies that are critical for such a system: full platform autonomy to enable mission execution independently from human operators and the ability of vision-based precision landing on a recharging station for automated energy replenishment. High-level autonomous decision making is implemented as a hierarchy of master and slave state machines. Vision-based precision landing is enabled by estimating the landing pad's pose using a bundle of AprilTag fiducials configured for detection from a wide range of altitudes. We provide an extensive evaluation of the landing pad pose estimation accuracy as a function of the bundle's geometry. The functionality of the complete system is demonstrated through two indoor experiments with a duration of 11 and 10.6 hours, and one outdoor experiment with a duration of 4 hours. The UAS executed 16, 48 and 22 flights respectively during these experiments. In the outdoor experiment, the ratio between flying to collect data and charging was 1 to 10, which is similar to past work in this domain. All flights were fully autonomous with no human in the loop. To our best knowledge this is the first research publication about the long-term outdoor operation of a quadrotor system with no human interaction.
* 38 pages, 28 figures
Long-Duration Autonomy for Small Rotorcraft UAS including Recharging
Oct 12, 2018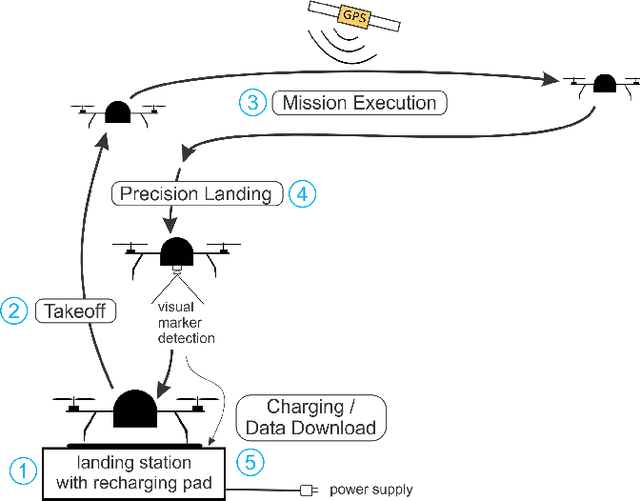
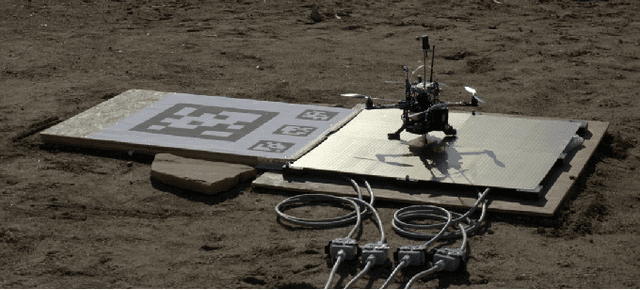
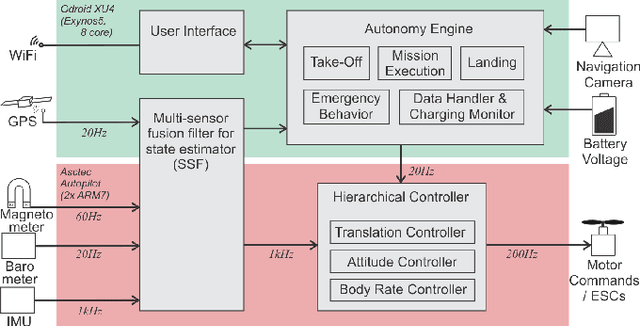
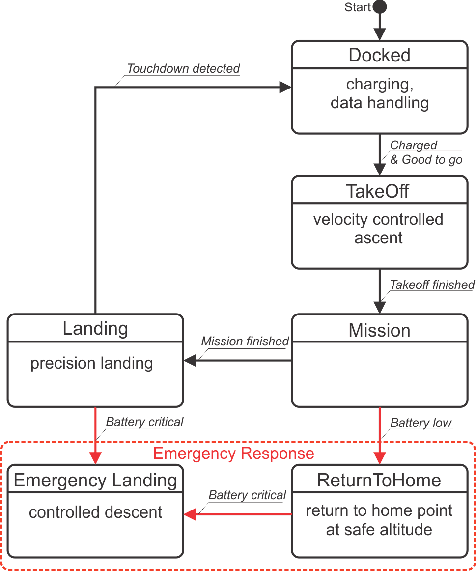
Many unmanned aerial vehicle surveillance and monitoring applications require observations at precise locations over long periods of time, ideally days or weeks at a time (e.g. ecosystem monitoring), which has been impractical due to limited endurance and the requirement of humans in the loop for operation. To overcome these limitations, we propose a fully autonomous small rotorcraft UAS that is capable of performing repeated sorties for long-term observation missions without any human intervention. We address two key technologies that are critical for such a system: full platform autonomy including emergency response to enable mission execution independently from human operators, and the ability of vision-based precision landing on a recharging station for automated energy replenishment. Experimental results of up to 11 hours of fully autonomous operation in indoor and outdoor environments illustrate the capability of our system.