 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuided Policy Search using Sequential Convex Programming for Initialization of Trajectory Optimization Algorithms
Oct 13, 2021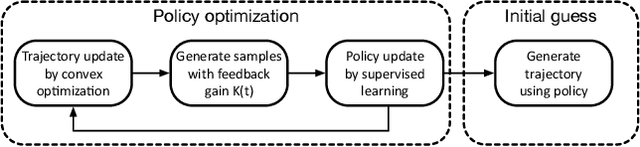

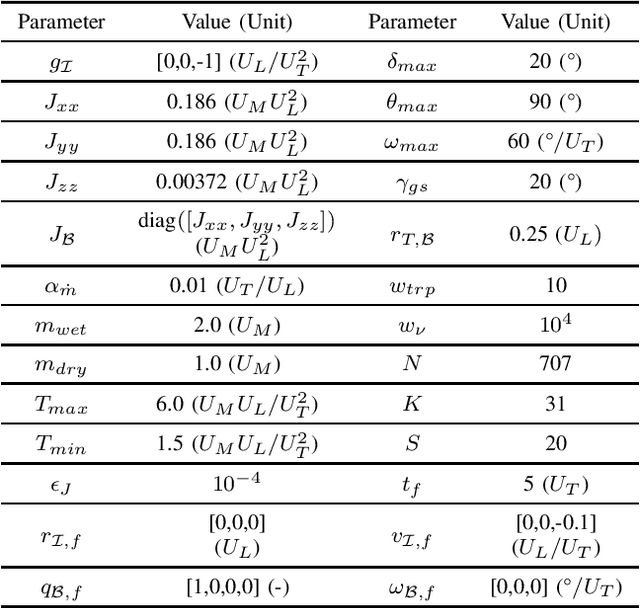
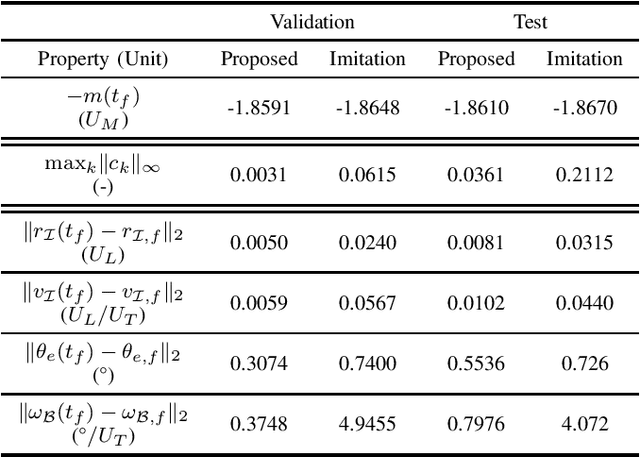
Nonlinear trajectory optimization algorithms have been developed to handle optimal control problems with nonlinear dynamics and nonconvex constraints in trajectory planning. The performance and computational efficiency of many trajectory optimization methods are sensitive to the initial guess, i.e., the trajectory guess needed by the recursive trajectory optimization algorithm. Motivated by this observation, we tackle the initialization problem for trajectory optimization via policy optimization. To optimize a policy, we propose a guided policy search method that has two key components: i) Trajectory update; ii) Policy update. The trajectory update involves offline solutions of a large number of trajectory optimization problems from different initial states via Sequential Convex Programming (SCP). Here we take a single SCP step to generate the trajectory iterate for each problem. In conjunction with these iterates, we also generate additional trajectories around each iterate via a feedback control law. Then all these trajectories are used by a stochastic gradient descent algorithm to update the neural network policy, i.e., the policy update step. As a result, the trained policy makes it possible to generate trajectory candidates that are close to the optimality and feasibility and that provide excellent initial guesses for the trajectory optimization methods. We validate the proposed method via a real-world 6-degree-of-freedom powered descent guidance problem for a reusable rocket.
Advances in Trajectory Optimization for Space Vehicle Control
Aug 23, 2021



Space mission design places a premium on cost and operational efficiency. The search for new science and life beyond Earth calls for spacecraft that can deliver scientific payloads to geologically rich yet hazardous landing sites. At the same time, the last four decades of optimization research have put a suite of powerful optimization tools at the fingertips of the controls engineer. As we enter the new decade, optimization theory, algorithms, and software tooling have reached a critical mass to start seeing serious application in space vehicle guidance and control systems. This survey paper provides a detailed overview of recent advances, successes, and promising directions for optimization-based space vehicle control. The considered applications include planetary landing, rendezvous and proximity operations, small body landing, constrained attitude reorientation, endo-atmospheric flight including ascent and reentry, and orbit transfer and injection. The primary focus is on the last ten years of progress, which have seen a veritable rise in the number of applications using three core technologies: lossless convexification, sequential convex programming, and model predictive control. The reader will come away with a well-rounded understanding of the state-of-the-art in each space vehicle control application, and will be well positioned to tackle important current open problems using convex optimization as a core technology.