 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-Duration Fully Autonomous Operation of Rotorcraft Unmanned Aerial Systems for Remote-Sensing Data Acquisition
Aug 18, 2019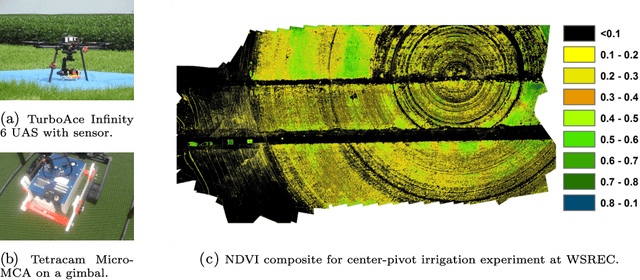
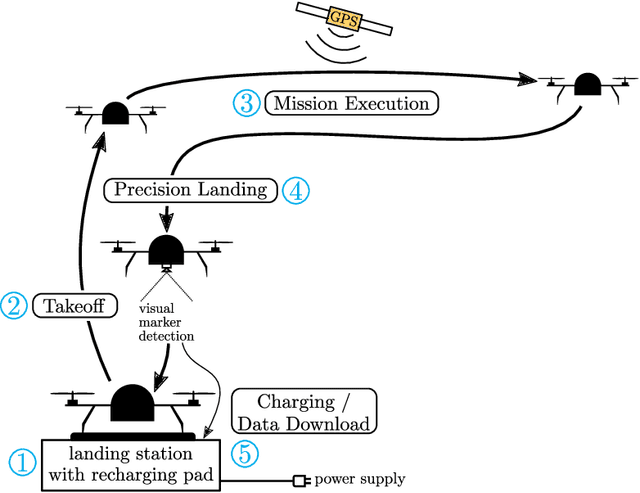
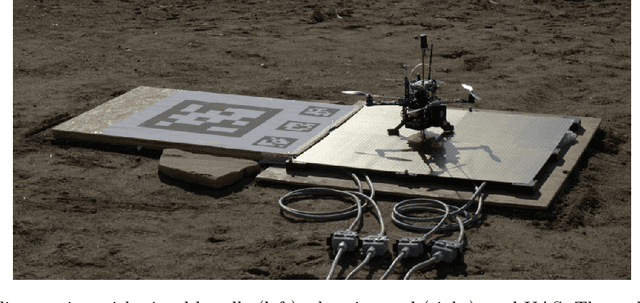
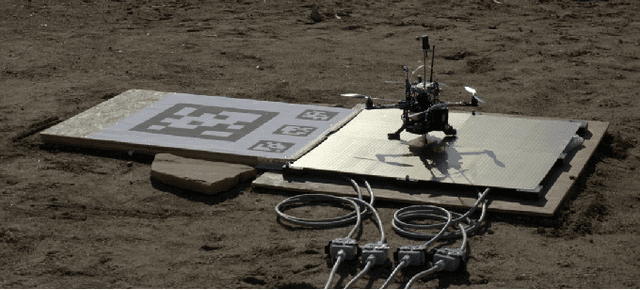
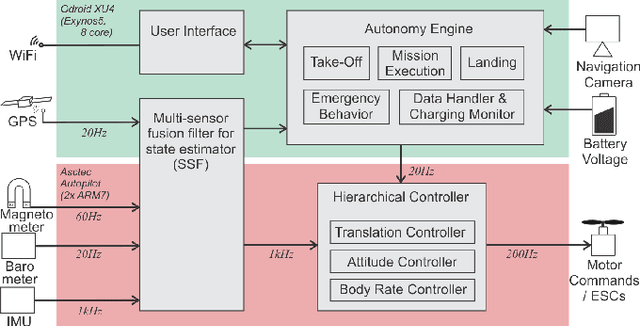
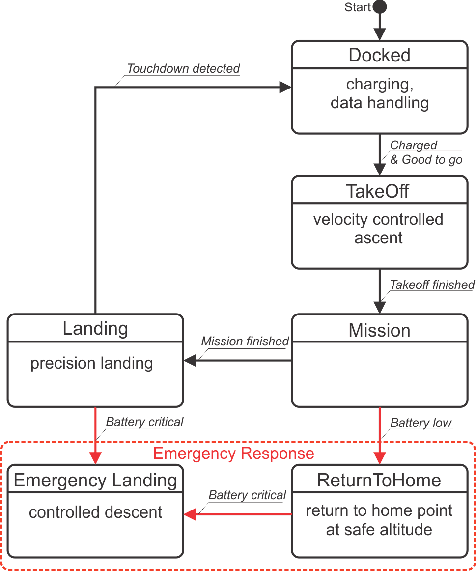
Recent applications of unmanned aerial systems (UAS) to precision agriculture have shown increased ease and efficiency in data collection at precise remote locations. However, further enhancement of the field requires operation over long periods of time, e.g. days or weeks. This has so far been impractical due to the limited flight times of such platforms and the requirement of humans in the loop for operation. To overcome these limitations, we propose a fully autonomous rotorcraft UAS that is capable of performing repeated flights for long-term observation missions without any human intervention. We address two key technologies that are critical for such a system: full platform autonomy to enable mission execution independently from human operators and the ability of vision-based precision landing on a recharging station for automated energy replenishment. High-level autonomous decision making is implemented as a hierarchy of master and slave state machines. Vision-based precision landing is enabled by estimating the landing pad's pose using a bundle of AprilTag fiducials configured for detection from a wide range of altitudes. We provide an extensive evaluation of the landing pad pose estimation accuracy as a function of the bundle's geometry. The functionality of the complete system is demonstrated through two indoor experiments with a duration of 11 and 10.6 hours, and one outdoor experiment with a duration of 4 hours. The UAS executed 16, 48 and 22 flights respectively during these experiments. In the outdoor experiment, the ratio between flying to collect data and charging was 1 to 10, which is similar to past work in this domain. All flights were fully autonomous with no human in the loop. To our best knowledge this is the first research publication about the long-term outdoor operation of a quadrotor system with no human interaction.
* 38 pages, 28 figures
Disturbance Estimation and Rejection for High-Precision Multirotor Position Control
Aug 08, 2019

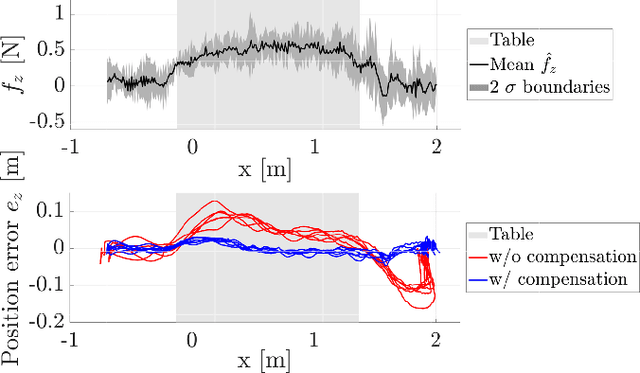
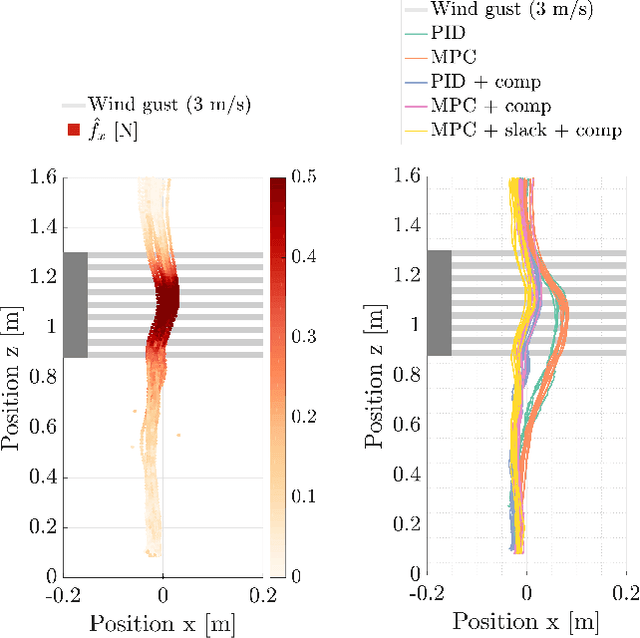
Many multirotor Unmanned Aerial Systems applications have a critical need for precise position control in environments with strong dynamic external disturbances such as wind gusts or ground and wall effects. Moreover, to maximize flight time, small multirotor platforms have to operate within strict constraints on payload and thus computational performance. In this paper, we present the design and experimental comparison of Model Predictive and PID multirotor position controllers augmented with a disturbance estimator to reject strong wind gusts up to 12 m/s and ground effect. For disturbance estimation, we compare Extended and Unscented Kalman filtering. In extensive in- and outdoor flight tests, we evaluate the suitability of the developed control and estimation algorithms to run on a computationally constrained platform. This allows to draw a conclusion on whether potential performance improvements justify the increased computational complexity of MPC for multirotor position control and UKF for disturbance estimation.
Long-Duration Autonomy for Small Rotorcraft UAS including Recharging
Oct 12, 2018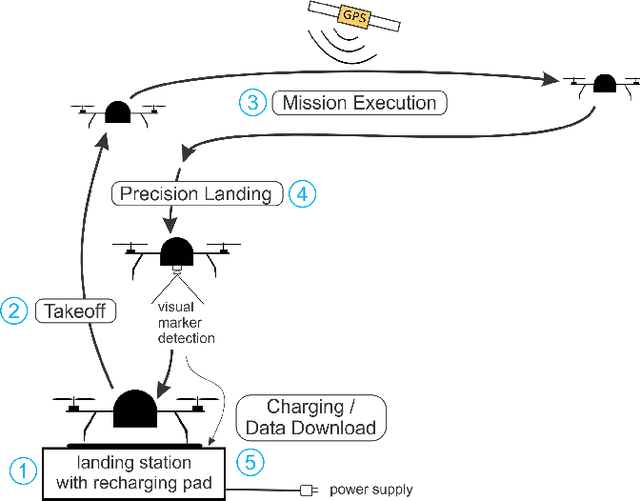
Many unmanned aerial vehicle surveillance and monitoring applications require observations at precise locations over long periods of time, ideally days or weeks at a time (e.g. ecosystem monitoring), which has been impractical due to limited endurance and the requirement of humans in the loop for operation. To overcome these limitations, we propose a fully autonomous small rotorcraft UAS that is capable of performing repeated sorties for long-term observation missions without any human intervention. We address two key technologies that are critical for such a system: full platform autonomy including emergency response to enable mission execution independently from human operators, and the ability of vision-based precision landing on a recharging station for automated energy replenishment. Experimental results of up to 11 hours of fully autonomous operation in indoor and outdoor environments illustrate the capability of our system.