 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsistent Pose Estimation of Unmanned Ground Vehicles through Terrain-Aided Multi-Sensor Fusion on Geometric Manifolds
Aug 20, 2025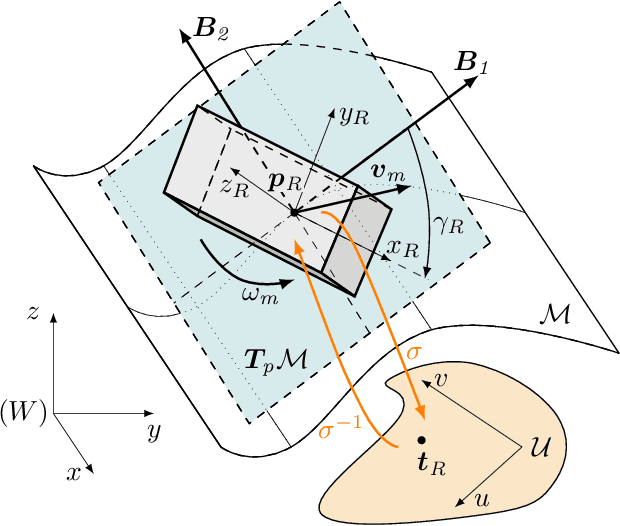
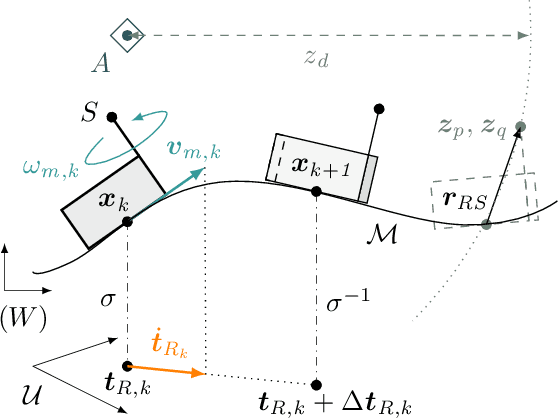
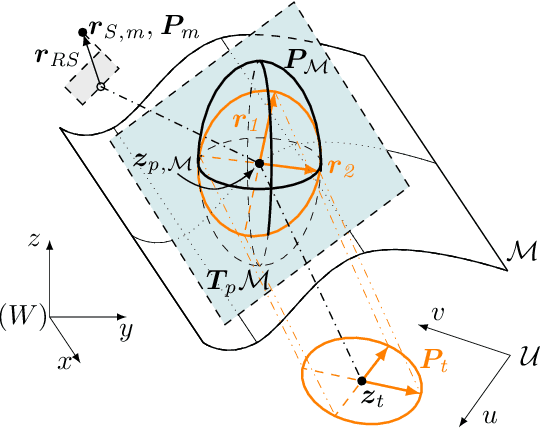
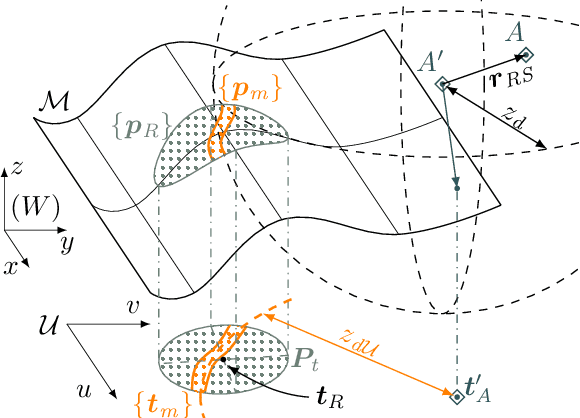
Aiming to enhance the consistency and thus long-term accuracy of Extended Kalman Filters for terrestrial vehicle localization, this paper introduces the Manifold Error State Extended Kalman Filter (M-ESEKF). By representing the robot's pose in a space with reduced dimensionality, the approach ensures feasible estimates on generic smooth surfaces, without introducing artificial constraints or simplifications that may degrade a filter's performance. The accompanying measurement models are compatible with common loosely- and tightly-coupled sensor modalities and also implicitly account for the ground geometry. We extend the formulation by introducing a novel correction scheme that embeds additional domain knowledge into the sensor data, giving more accurate uncertainty approximations and further enhancing filter consistency. The proposed estimator is seamlessly integrated into a validated modular state estimation framework, demonstrating compatibility with existing implementations. Extensive Monte Carlo simulations across diverse scenarios and dynamic sensor configurations show that the M-ESEKF outperforms classical filter formulations in terms of consistency and stability. Moreover, it eliminates the need for scenario-specific parameter tuning, enabling its application in a variety of real-world settings.
Sensor Model Identification via Simultaneous Model Selection and State Variable Determination
Jun 12, 2025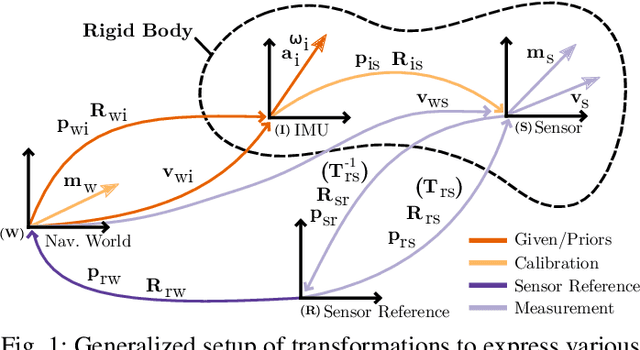
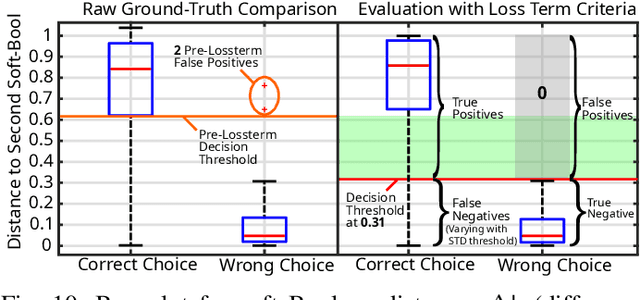
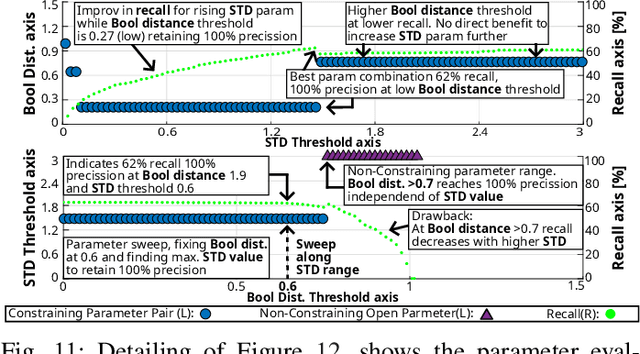
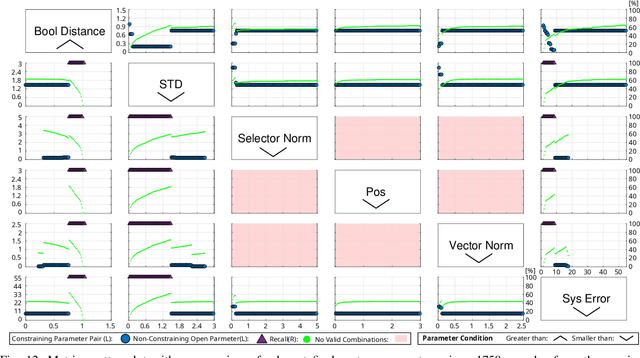
We present a method for the unattended gray-box identification of sensor models commonly used by localization algorithms in the field of robotics. The objective is to determine the most likely sensor model for a time series of unknown measurement data, given an extendable catalog of predefined sensor models. Sensor model definitions may require states for rigid-body calibrations and dedicated reference frames to replicate a measurement based on the robot's localization state. A health metric is introduced, which verifies the outcome of the selection process in order to detect false positives and facilitate reliable decision-making. In a second stage, an initial guess for identified calibration states is generated, and the necessity of sensor world reference frames is evaluated. The identified sensor model with its parameter information is then used to parameterize and initialize a state estimation application, thus ensuring a more accurate and robust integration of new sensor elements. This method is helpful for inexperienced users who want to identify the source and type of a measurement, sensor calibrations, or sensor reference frames. It will also be important in the field of modular multi-agent scenarios and modularized robotic platforms that are augmented by sensor modalities during runtime. Overall, this work aims to provide a simplified integration of sensor modalities to downstream applications and circumvent common pitfalls in the usage and development of localization approaches.
Equivariant IMU Preintegration with Biases: a Galilean Group Approach
Nov 24, 2024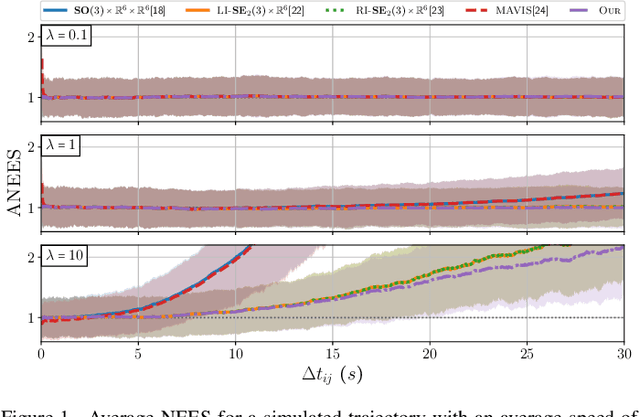
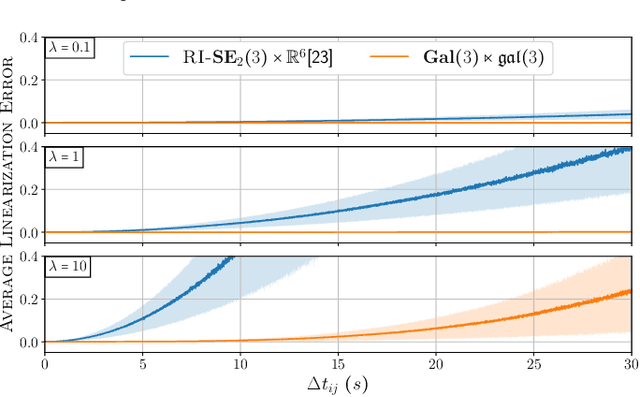
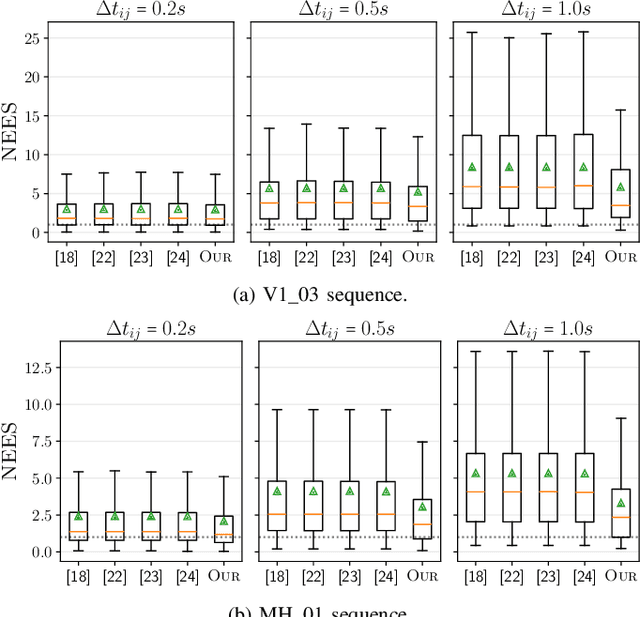
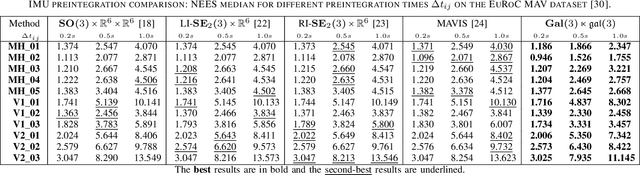
This letter proposes a new approach for Inertial Measurement Unit (IMU) preintegration, a fundamental building block that can be leveraged in different optimization-based Inertial Navigation System (INS) localization solutions. Inspired by recent advances in equivariant theory applied to biased INSs, we derive a discrete-time formulation of the IMU preintegration on ${\mathbf{Gal}(3) \ltimes \mathfrak{gal}(3)}$, the left-trivialization of the tangent group of the Galilean group $\mathbf{Gal}(3)$. We define a novel preintegration error that geometrically couples the navigation states and the bias leading to lower linearization error. Our method improves in consistency compared to existing preintegration approaches which treat IMU biases as a separate state-space. Extensive validation against state-of-the-art methods, both in simulation and with real-world IMU data, implementation in the Lie++ library, and open-source code are provided.
Equivariant IMU Preintegration with Biases: an Inhomogeneous Galilean Group Approach
Nov 08, 2024This letter proposes a new approach for Inertial Measurement Unit (IMU) preintegration, a fundamental building block that can be leveraged in different optimization-based Inertial Navigation System (INS) localization solutions. Inspired by recent advancements in equivariant theory applied to biased INSs, we derive a discrete-time formulation of the IMU preintegration on $\mathbf{G}(3) \ltimes \mathfrak{g}(3)$, the tangent group of the inhomogeneous Galilean group $\mathbf{G}(3)$. We define a novel preintegration error that geometrically couples the navigation states and the bias leading to lower linearization error. Our method improves in consistency compared to existing preintegration approaches which treat IMU biases as a separate state-space. Extensive validation against state-of-the-art methods, both in simulation and with real-world IMU data, implementation in the Lie++ library, and open-sourcing of the code are provided.
Equivariant Symmetries for Aided Inertial Navigation
Jul 19, 2024



Respecting the geometry of the underlying system and exploiting its symmetry have been driving concepts in deriving modern geometric filters for inertial navigation systems (INSs). Despite their success, the explicit treatment of inertial measurement unit (IMU) biases remains challenging, unveiling a gap in the current theory of filter design. In response to this gap, this dissertation builds upon the recent theory of equivariant systems to address and overcome the limitations in existing methodologies. The goal is to identify new symmetries of inertial navigation systems that include a geometric treatment of IMU biases and exploit them to design filtering algorithms that outperform state-of-the-art solutions in terms of accuracy, convergence rate, robustness, and consistency. This dissertation leverages the semi-direct product rule and introduces the tangent group for inertial navigation systems as the first equivariant symmetry that properly accounts for IMU biases. Based on that, we show that it is possible to derive an equivariant filter (EqF) algorithm with autonomous navigation error dynamics. The resulting filter demonstrates superior to state-of-the-art solutions. Through a comprehensive analysis of various symmetries of inertial navigation systems, we formalized the concept that every filter can be derived as an EqF with a specific choice of symmetry. This underlines the fundamental role of symmetry in determining filter performance. This dissertation advances the understanding of equivariant symmetries in the context of inertial navigation systems and serves as a basis for the next generation of equivariant estimators, marking a significant leap toward more reliable navigation solutions.
MSCEqF: A Multi State Constraint Equivariant Filter for Vision-aided Inertial Navigation
Nov 20, 2023



This letter re-visits the problem of visual-inertial navigation system (VINS) and presents a novel filter design we dub the multi state constraint equivariant filter (MSCEqF, in analogy to the well known MSCKF). We define a symmetry group and corresponding group action that allow specifically the design of an equivariant filter for the problem of visual-inertial odometry (VIO) including IMU bias, and camera intrinsic and extrinsic calibration states. In contrast to state-of-the-art invariant extended Kalman filter (IEKF) approaches that simply tack IMU bias and other states onto the $\mathbf{SE}_2(3)$ group, our filter builds upon a symmetry that properly includes all the states in the group structure. Thus, we achieve improved behavior, particularly when linearization points largely deviate from the truth (i.e., on transients upon state disturbances). Our approach is inherently consistent even during convergence phases from significant errors without the need for error uncertainty adaptation, observability constraint, or other consistency enforcing techniques. This leads to greatly improved estimator behavior for significant error and unexpected state changes during, e.g., long-duration missions. We evaluate our approach with a multitude of different experiments using three different prominent real-world datasets.
Revisiting multi-GNSS Navigation for UAVs -- An Equivariant Filtering Approach
Oct 16, 2023
In this work, we explore the recent advances in equivariant filtering for inertial navigation systems to improve state estimation for uncrewed aerial vehicles (UAVs). Traditional state-of-the-art estimation methods, e.g., the multiplicative Kalman filter (MEKF), have some limitations concerning their consistency, errors in the initial state estimate, and convergence performance. Symmetry-based methods, such as the equivariant filter (EqF), offer significant advantages for these points by exploiting the mathematical properties of the system - its symmetry. These filters yield faster convergence rates and robustness to wrong initial state estimates through their error definition. To demonstrate the usability of EqFs, we focus on the sensor-fusion problem with the most common sensors in outdoor robotics: global navigation satellite system (GNSS) sensors and an inertial measurement unit (IMU). We provide an implementation of such an EqF leveraging the semi-direct product of the symmetry group to derive the filter equations. To validate the practical usability of EqFs in real-world scenarios, we evaluate our method using data from all outdoor runs of the INSANE Dataset. Our results demonstrate the performance improvements of the EqF in real-world environments, highlighting its potential for enhancing state estimation for UAVs.
Equivariant Symmetries for Inertial Navigation Systems
Sep 07, 2023
This paper investigates the problem of inertial navigation system (INS) filter design through the lens of symmetry. The extended Kalman filter (EKF) and its variants, have been the staple of INS filtering for 50 years; however, recent advances in inertial navigation systems have exploited matrix Lie group structure to design stochastic filters and state observers that have been shown to display superior performance compared to classical solutions. In this work we consider the case where a vehicle has an inertial measurement unit (IMU) and a global navigation satellite system (GNSS) receiver. We show that all the modern variants of the EKF for these sensors can be interpreted as the recently proposed Equivariant Filter (EqF) design methodology applied to different choices of symmetry group for the INS problem. This leads us to propose two new symmetries for the INS problem that have not been considered in the prior literature, and provide a discussion of the relative strengths and weaknesses of all the different algorithms. We believe the collection of symmetries that we present here capture all the sensible choices of symmetry for this problem and sensor suite, and that the analysis provided is indicative of the relative real-world performance potential of the different algorithms.
UVIO: An UWB-Aided Visual-Inertial Odometry Framework with Bias-Compensated Anchors Initialization
Aug 01, 2023This paper introduces UVIO, a multi-sensor framework that leverages Ultra Wide Band (UWB) technology and Visual-Inertial Odometry (VIO) to provide robust and low-drift localization. In order to include range measurements in state estimation, the position of the UWB anchors must be known. This study proposes a multi-step initialization procedure to map multiple unknown anchors by an Unmanned Aerial Vehicle (UAV), in a fully autonomous fashion. To address the limitations of initializing UWB anchors via a random trajectory, this paper uses the Geometric Dilution of Precision (GDOP) as a measure of optimality in anchor position estimation, to compute a set of optimal waypoints and synthesize a trajectory that minimizes the mapping uncertainty. After the initialization is complete, the range measurements from multiple anchors, including measurement biases, are tightly integrated into the VIO system. While in range of the initialized anchors, the VIO drift in position and heading is eliminated. The effectiveness of UVIO and our initialization procedure has been validated through a series of simulations and real-world experiments.
INSANE: Cross-Domain UAV Data Sets with Increased Number of Sensors for developing Advanced and Novel Estimators
Oct 17, 2022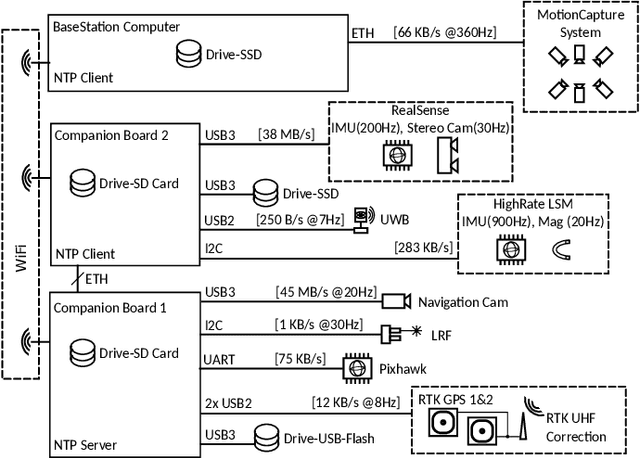
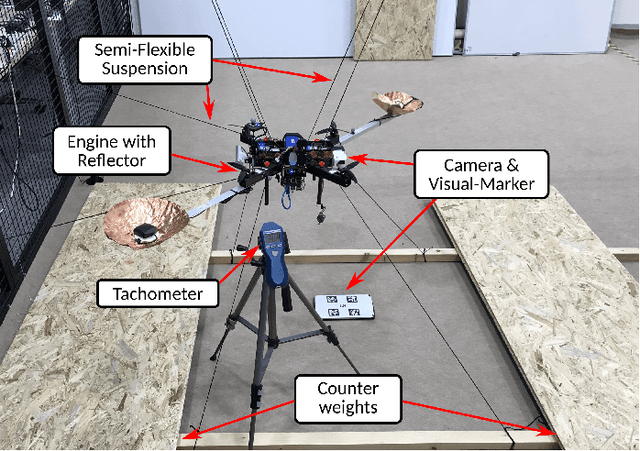
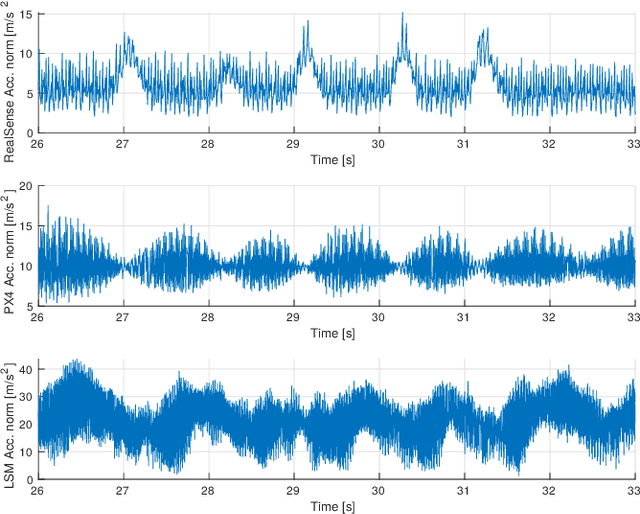
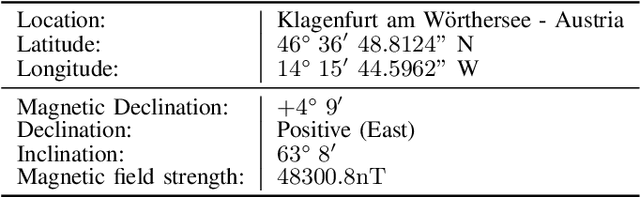
For real-world applications, autonomous mobile robotic platforms must be capable of navigating safely in a multitude of different and dynamic environments with accurate and robust localization being a key prerequisite. To support further research in this domain, we present the INSANE data sets - a collection of versatile Micro Aerial Vehicle (MAV) data sets for cross-environment localization. The data sets provide various scenarios with multiple stages of difficulty for localization methods. These scenarios range from trajectories in the controlled environment of an indoor motion capture facility, to experiments where the vehicle performs an outdoor maneuver and transitions into a building, requiring changes of sensor modalities, up to purely outdoor flight maneuvers in a challenging Mars analog environment to simulate scenarios which current and future Mars helicopters would need to perform. The presented work aims to provide data that reflects real-world scenarios and sensor effects. The extensive sensor suite includes various sensor categories, including multiple Inertial Measurement Units (IMUs) and cameras. Sensor data is made available as raw measurements and each data set provides highly accurate ground truth, including the outdoor experiments where a dual Real-Time Kinematic (RTK) Global Navigation Satellite System (GNSS) setup provides sub-degree and centimeter accuracy (1-sigma). The sensor suite also includes a dedicated high-rate IMU to capture all the vibration dynamics of the vehicle during flight to support research on novel machine learning-based sensor signal enhancement methods for improved localization. The data sets and post-processing tools are available at: https://sst.aau.at/cns/datasets