 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeT$^3$-S2S: Training-free Triplet Tuning for Sketch to Scene Generation
Dec 18, 2024Scene generation is crucial to many computer graphics applications. Recent advances in generative AI have streamlined sketch-to-image workflows, easing the workload for artists and designers in creating scene concept art. However, these methods often struggle for complex scenes with multiple detailed objects, sometimes missing small or uncommon instances. In this paper, we propose a Training-free Triplet Tuning for Sketch-to-Scene (T3-S2S) generation after reviewing the entire cross-attention mechanism. This scheme revitalizes the existing ControlNet model, enabling effective handling of multi-instance generations, involving prompt balance, characteristics prominence, and dense tuning. Specifically, this approach enhances keyword representation via the prompt balance module, reducing the risk of missing critical instances. It also includes a characteristics prominence module that highlights TopK indices in each channel, ensuring essential features are better represented based on token sketches. Additionally, it employs dense tuning to refine contour details in the attention map, compensating for instance-related regions. Experiments validate that our triplet tuning approach substantially improves the performance of existing sketch-to-image models. It consistently generates detailed, multi-instance 2D images, closely adhering to the input prompts and enhancing visual quality in complex multi-instance scenes. Code is available at https://github.com/chaos-sun/t3s2s.git.
Sketch2Scene: Automatic Generation of Interactive 3D Game Scenes from User's Casual Sketches
Aug 08, 2024



3D Content Generation is at the heart of many computer graphics applications, including video gaming, film-making, virtual and augmented reality, etc. This paper proposes a novel deep-learning based approach for automatically generating interactive and playable 3D game scenes, all from the user's casual prompts such as a hand-drawn sketch. Sketch-based input offers a natural, and convenient way to convey the user's design intention in the content creation process. To circumvent the data-deficient challenge in learning (i.e. the lack of large training data of 3D scenes), our method leverages a pre-trained 2D denoising diffusion model to generate a 2D image of the scene as the conceptual guidance. In this process, we adopt the isometric projection mode to factor out unknown camera poses while obtaining the scene layout. From the generated isometric image, we use a pre-trained image understanding method to segment the image into meaningful parts, such as off-ground objects, trees, and buildings, and extract the 2D scene layout. These segments and layouts are subsequently fed into a procedural content generation (PCG) engine, such as a 3D video game engine like Unity or Unreal, to create the 3D scene. The resulting 3D scene can be seamlessly integrated into a game development environment and is readily playable. Extensive tests demonstrate that our method can efficiently generate high-quality and interactive 3D game scenes with layouts that closely follow the user's intention.
MAVIS: Multi-Camera Augmented Visual-Inertial SLAM using SE2(3) Based Exact IMU Pre-integration
Sep 18, 2023



We present a novel optimization-based Visual-Inertial SLAM system designed for multiple partially overlapped camera systems, named MAVIS. Our framework fully exploits the benefits of wide field-of-view from multi-camera systems, and the metric scale measurements provided by an inertial measurement unit (IMU). We introduce an improved IMU pre-integration formulation based on the exponential function of an automorphism of SE_2(3), which can effectively enhance tracking performance under fast rotational motion and extended integration time. Furthermore, we extend conventional front-end tracking and back-end optimization module designed for monocular or stereo setup towards multi-camera systems, and introduce implementation details that contribute to the performance of our system in challenging scenarios. The practical validity of our approach is supported by our experiments on public datasets. Our MAVIS won the first place in all the vision-IMU tracks (single and multi-session SLAM) on Hilti SLAM Challenge 2023 with 1.7 times the score compared to the second place.
High Frequency, High Accuracy Pointing onboard Nanosats using Neuromorphic Event Sensing and Piezoelectric Actuation
Sep 11, 2023As satellites become smaller, the ability to maintain stable pointing decreases as external forces acting on the satellite come into play. At the same time, reaction wheels used in the attitude determination and control system (ADCS) introduce high frequency jitter which can disrupt pointing stability. For space domain awareness (SDA) tasks that track objects tens of thousands of kilometres away, the pointing accuracy offered by current nanosats, typically in the range of 10 to 100 arcseconds, is not sufficient. In this work, we develop a novel payload that utilises a neuromorphic event sensor (for high frequency and highly accurate relative attitude estimation) paired in a closed loop with a piezoelectric stage (for active attitude corrections) to provide highly stable sensor-specific pointing. Event sensors are especially suited for space applications due to their desirable characteristics of low power consumption, asynchronous operation, and high dynamic range. We use the event sensor to first estimate a reference background star field from which instantaneous relative attitude is estimated at high frequency. The piezoelectric stage works in a closed control loop with the event sensor to perform attitude corrections based on the discrepancy between the current and desired attitude. Results in a controlled setting show that we can achieve a pointing accuracy in the range of 1-5 arcseconds using our novel payload at an operating frequency of up to 50Hz using a prototype built from commercial-off-the-shelf components. Further details can be found at https://ylatif.github.io/ultrafinestabilisation
An Asynchronous Linear Filter Architecture for Hybrid Event-Frame Cameras
Sep 03, 2023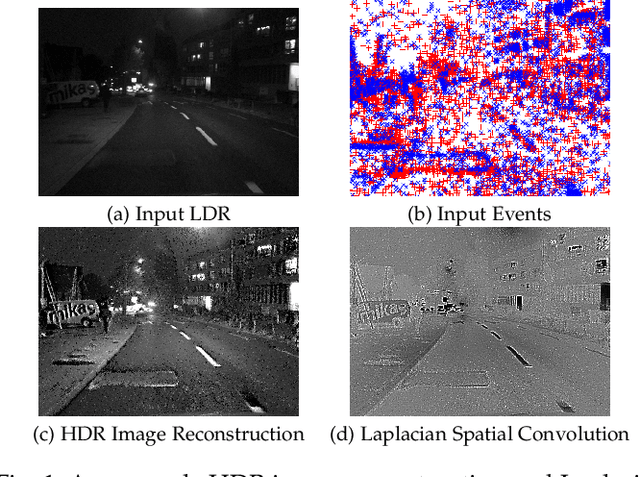



Event cameras are ideally suited to capture High Dynamic Range (HDR) visual information without blur but provide poor imaging capability for static or slowly varying scenes. Conversely, conventional image sensors measure absolute intensity of slowly changing scenes effectively but do poorly on HDR or quickly changing scenes. In this paper, we present an asynchronous linear filter architecture, fusing event and frame camera data, for HDR video reconstruction and spatial convolution that exploits the advantages of both sensor modalities. The key idea is the introduction of a state that directly encodes the integrated or convolved image information and that is updated asynchronously as each event or each frame arrives from the camera. The state can be read-off as-often-as and whenever required to feed into subsequent vision modules for real-time robotic systems. Our experimental results are evaluated on both publicly available datasets with challenging lighting conditions and fast motions, along with a new dataset with HDR reference that we provide. The proposed AKF pipeline outperforms other state-of-the-art methods in both absolute intensity error (69.4% reduction) and image similarity indexes (average 35.5% improvement). We also demonstrate the integration of image convolution with linear spatial kernels Gaussian, Sobel, and Laplacian as an application of our architecture.
Overcoming Bias: Equivariant Filter Design for Biased Attitude Estimation with Online Calibration
Sep 24, 2022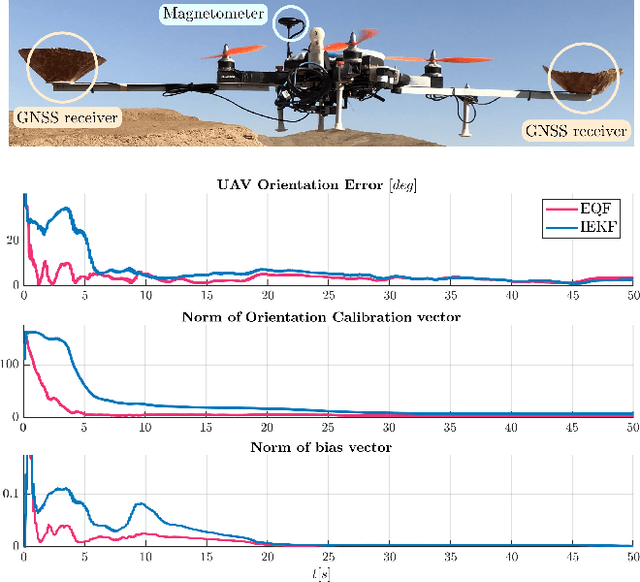
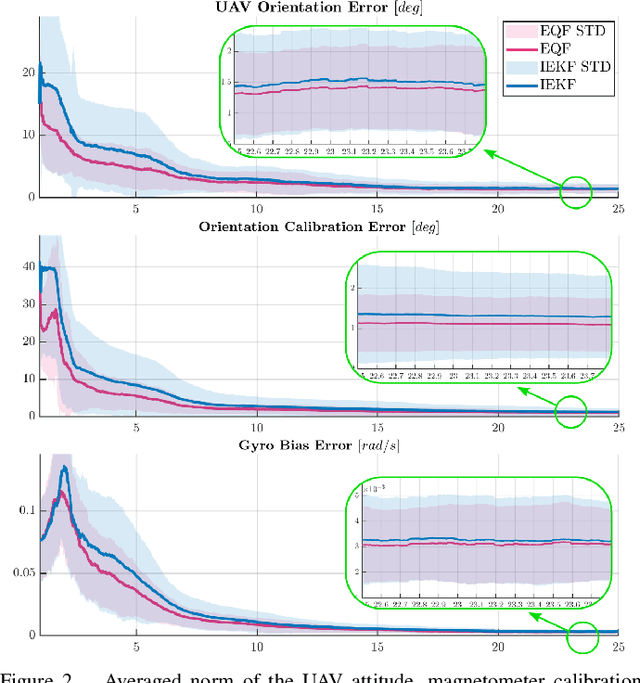
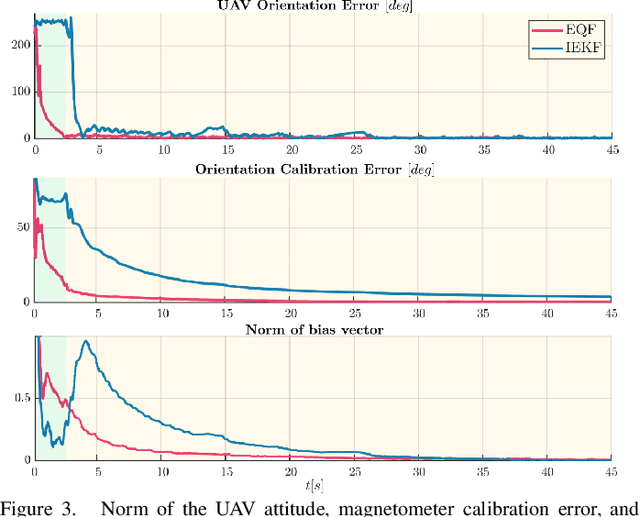
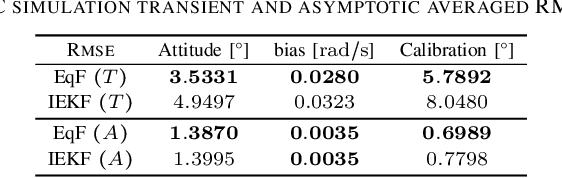
Stochastic filters for on-line state estimation are a core technology for autonomous systems. The performance of such filters is one of the key limiting factors to a system's capability. Both asymptotic behavior (e.g.,~for regular operation) and transient response (e.g.,~for fast initialization and reset) of such filters are of crucial importance in guaranteeing robust operation of autonomous systems. This paper introduces a new generic formulation for a gyroscope aided attitude estimator using N direction measurements including both body-frame and reference-frame direction type measurements. The approach is based on an integrated state formulation that incorporates navigation, extrinsic calibration for all direction sensors, and gyroscope bias states in a single equivariant geometric structure. This newly proposed symmetry allows modular addition of different direction measurements and their extrinsic calibration while maintaining the ability to include bias states in the same symmetry. The subsequently proposed filter-based estimator using this symmetry noticeably improves the transient response, and the asymptotic bias and extrinsic calibration estimation compared to state-of-the-art approaches. The estimator is verified in statistically representative simulations and is tested in real-world experiments.
Smart Visual Beacons with Asynchronous Optical Communications using Event Cameras
Aug 02, 2022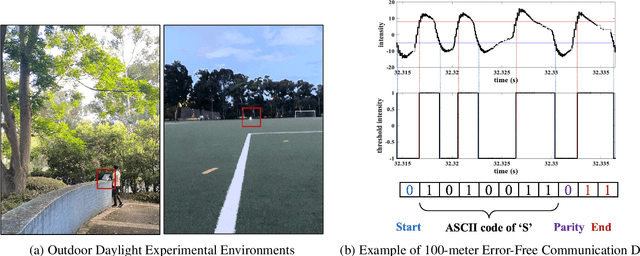

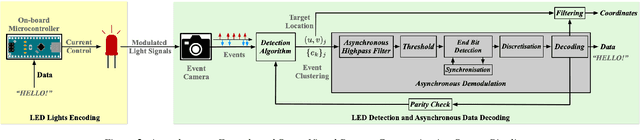
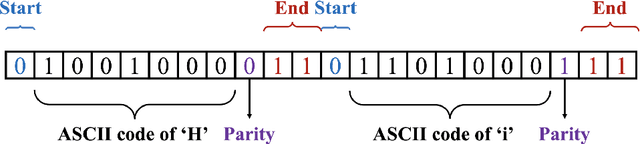
Event cameras are bio-inspired dynamic vision sensors that respond to changes in image intensity with a high temporal resolution, high dynamic range and low latency. These sensor characteristics are ideally suited to enable visual target tracking in concert with a broadcast visual communication channel for smart visual beacons with applications in distributed robotics. Visual beacons can be constructed by high-frequency modulation of Light Emitting Diodes (LEDs) such as vehicle headlights, Internet of Things (IoT) LEDs, smart building lights, etc., that are already present in many real-world scenarios. The high temporal resolution characteristic of the event cameras allows them to capture visual signals at far higher data rates compared to classical frame-based cameras. In this paper, we propose a novel smart visual beacon architecture with both LED modulation and event camera demodulation algorithms. We quantitatively evaluate the relationship between LED transmission rate, communication distance and the message transmission accuracy for the smart visual beacon communication system that we prototyped. The proposed method achieves up to 4 kbps in an indoor environment and lossless transmission over a distance of 100 meters, at a transmission rate of 500 bps, in full sunlight, demonstrating the potential of the technology in an outdoor environment.
A Linear Comb Filter for Event Flicker Removal
May 17, 2022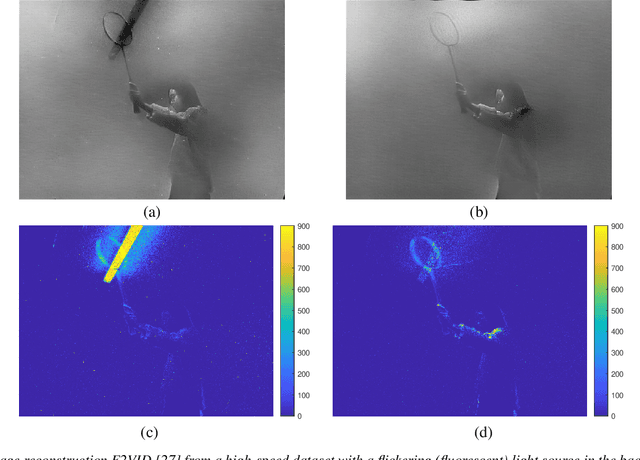
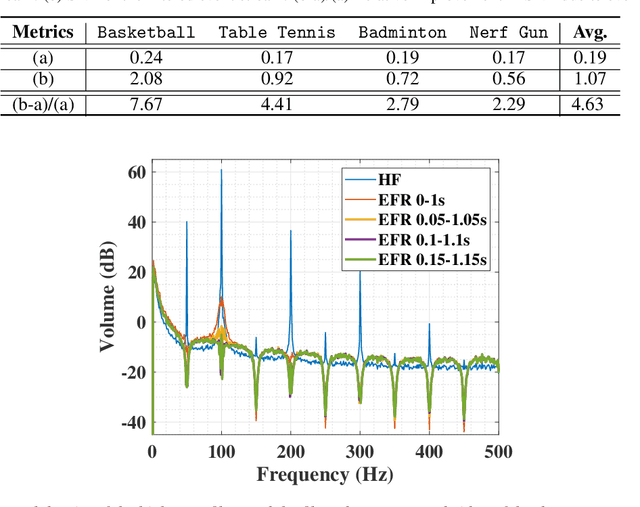
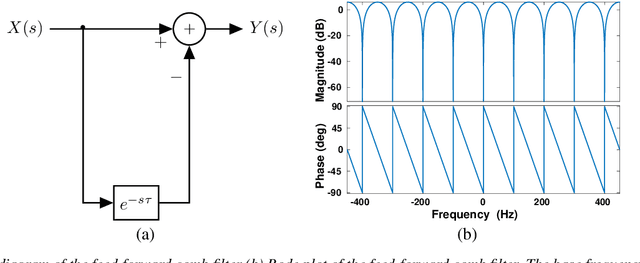
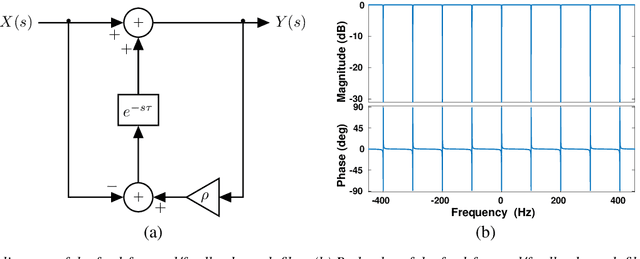
Event cameras are bio-inspired sensors that capture per-pixel asynchronous intensity change rather than the synchronous absolute intensity frames captured by a classical camera sensor. Such cameras are ideal for robotics applications since they have high temporal resolution, high dynamic range and low latency. However, due to their high temporal resolution, event cameras are particularly sensitive to flicker such as from fluorescent or LED lights. During every cycle from bright to dark, pixels that image a flickering light source generate many events that provide little or no useful information for a robot, swamping the useful data in the scene. In this paper, we propose a novel linear filter to preprocess event data to remove unwanted flicker events from an event stream. The proposed algorithm achieves over 4.6 times relative improvement in the signal-to-noise ratio when compared to the raw event stream due to the effective removal of flicker from fluorescent lighting. Thus, it is ideally suited to robotics applications that operate in indoor settings or scenes illuminated by flickering light sources.
Equivariant Filter Design for Inertial Navigation Systems with Input Measurement Biases
Feb 04, 2022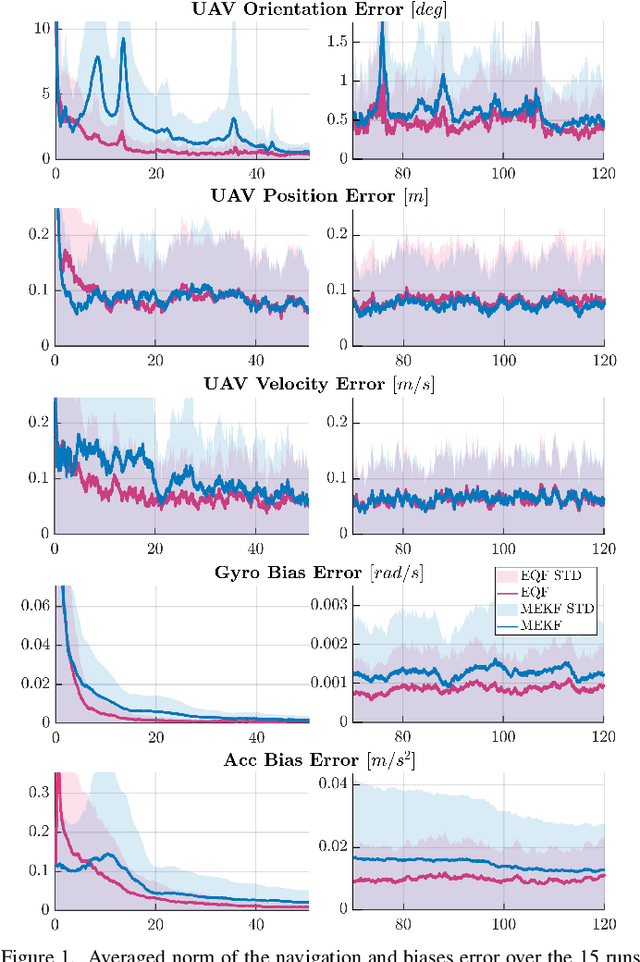
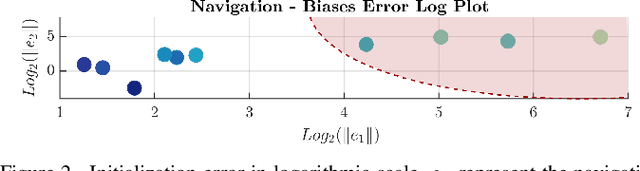

Inertial Navigation Systems (INS) are a key technology for autonomous vehicles applications. Recent advances in estimation and filter design for the INS problem have exploited geometry and symmetry to overcome limitations of the classical Extended Kalman Filter (EKF) approach that formed the mainstay of INS systems since the mid-twentieth century. The industry standard INS filter, the Multiplicative Extended Kalman Filter (MEKF), uses a geometric construction for attitude estimation coupled with classical Euclidean construction for position, velocity and bias estimation. The recent Invariant Extended Kalman Filter (IEKF) provides a geometric framework for the full navigation states, integrating attitude, position and velocity, but still uses the classical Euclidean construction to model the bias states. In this paper, we use the recently proposed Equivariant Filter (EqF) framework to derive a novel observer for biased inertial-based navigation in a fully geometric framework. The introduction of virtual velocity inputs with associated virtual bias leads to a full equivariant symmetry on the augmented system. The resulting filter performance is evaluated with both simulated and real-world data, and demonstrates increased robustness to a wide range of erroneous initial conditions, and improved accuracy when compared with the industry standard Multiplicative EKF (MEKF) approach.
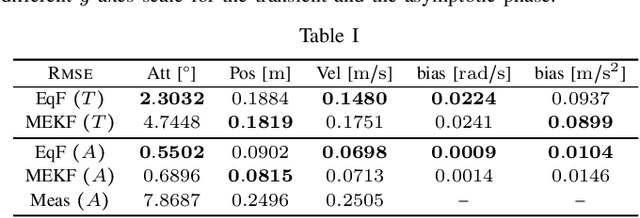
Stereo Hybrid Event-Frame Cameras for 3D Perception
Oct 11, 2021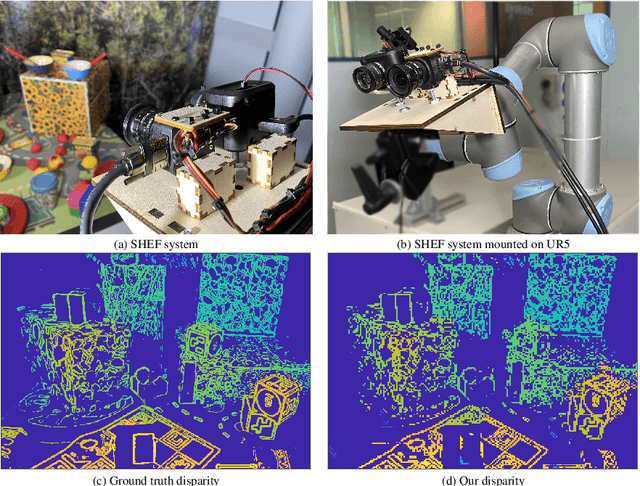
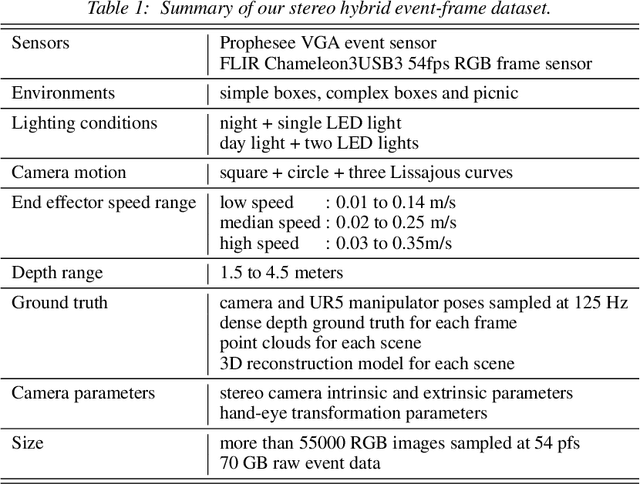
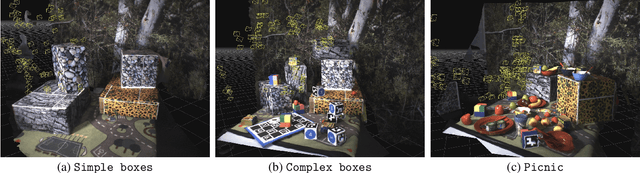
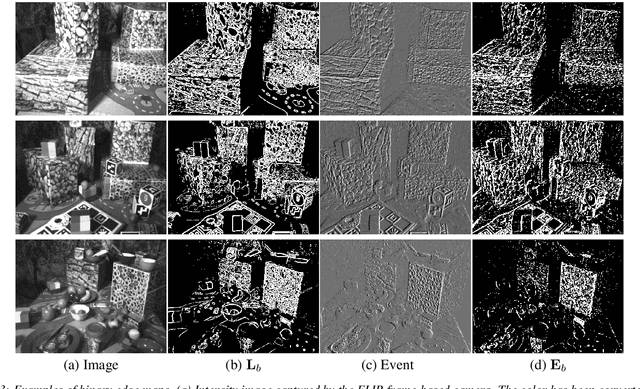
Stereo camera systems play an important role in robotics applications to perceive the 3D world. However, conventional cameras have drawbacks such as low dynamic range, motion blur and latency due to the underlying frame-based mechanism. Event cameras address these limitations as they report the brightness changes of each pixel independently with a fine temporal resolution, but they are unable to acquire absolute intensity information directly. Although integrated hybrid event-frame sensors (eg., DAVIS) are available, the quality of data is compromised by coupling at the pixel level in the circuit fabrication of such cameras. This paper proposes a stereo hybrid event-frame (SHEF) camera system that offers a sensor modality with separate high-quality pure event and pure frame cameras, overcoming the limitations of each separate sensor and allowing for stereo depth estimation. We provide a SHEF dataset targeted at evaluating disparity estimation algorithms and introduce a stereo disparity estimation algorithm that uses edge information extracted from the event stream correlated with the edge detected in the frame data. Our disparity estimation outperforms the state-of-the-art stereo matching algorithm on the SHEF dataset.