 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Asynchronous Linear Filter Architecture for Hybrid Event-Frame Cameras
Sep 03, 2023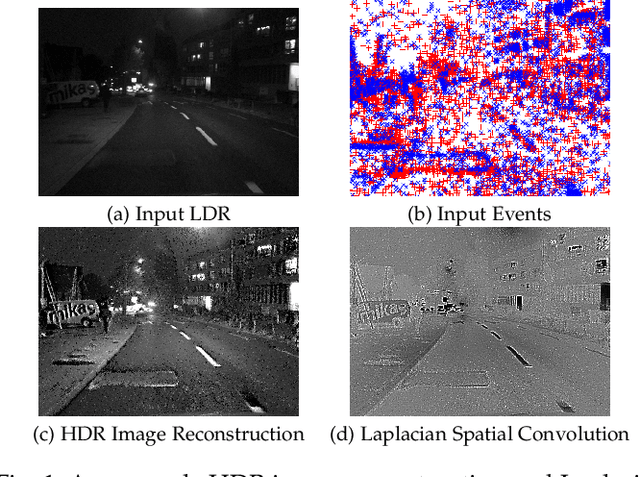



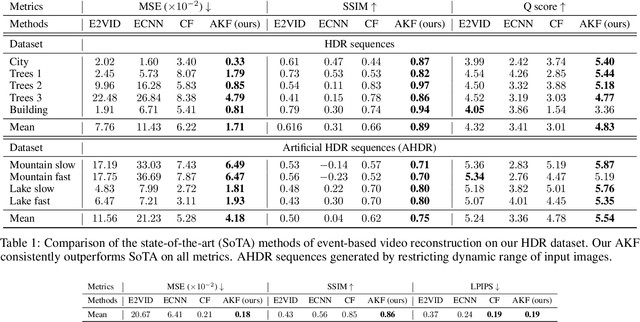
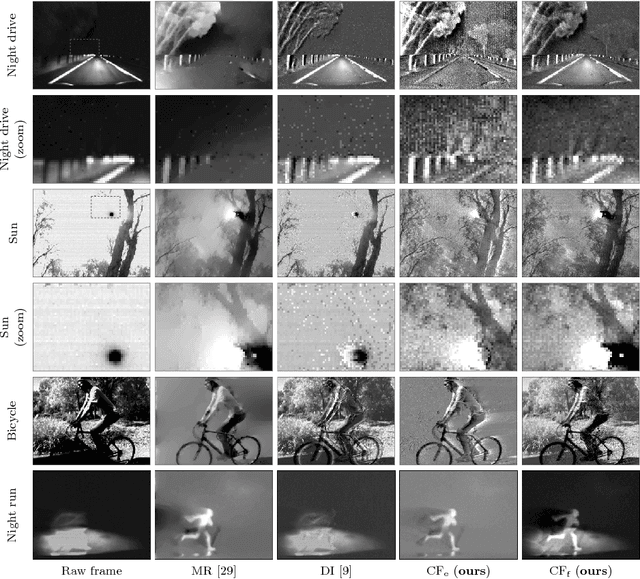
Event cameras are ideally suited to capture High Dynamic Range (HDR) visual information without blur but provide poor imaging capability for static or slowly varying scenes. Conversely, conventional image sensors measure absolute intensity of slowly changing scenes effectively but do poorly on HDR or quickly changing scenes. In this paper, we present an asynchronous linear filter architecture, fusing event and frame camera data, for HDR video reconstruction and spatial convolution that exploits the advantages of both sensor modalities. The key idea is the introduction of a state that directly encodes the integrated or convolved image information and that is updated asynchronously as each event or each frame arrives from the camera. The state can be read-off as-often-as and whenever required to feed into subsequent vision modules for real-time robotic systems. Our experimental results are evaluated on both publicly available datasets with challenging lighting conditions and fast motions, along with a new dataset with HDR reference that we provide. The proposed AKF pipeline outperforms other state-of-the-art methods in both absolute intensity error (69.4% reduction) and image similarity indexes (average 35.5% improvement). We also demonstrate the integration of image convolution with linear spatial kernels Gaussian, Sobel, and Laplacian as an application of our architecture.
An Asynchronous Kalman Filter for Hybrid Event Cameras
Dec 10, 2020
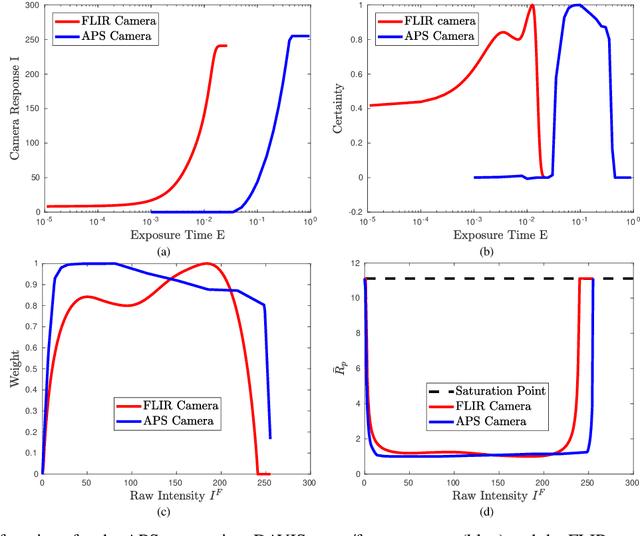

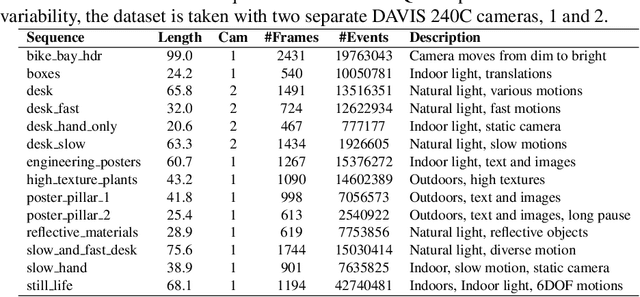
We present an Asynchronous Kalman Filter (AKF) to reconstruct High Dynamic Range (HDR) videos by fusing low-dynamic range images with event data. Event cameras are ideally suited to capture HDR visual information without blur but perform poorly on static or slowly changing scenes. Conversely, conventional image sensors measure absolute intensity of slowly changing scenes effectively but do poorly on quickly changing scenes with high dynamic range. The proposed approach exploits advantages of hybrid sensors under a unifying uncertainty model for both conventional frames and events. We present a novel dataset targeting challenging HDR and fast motion scenes captured on two separate sensors: an RGB frame-based camera and an event camera. Our video reconstruction outperforms the state-of-the-art algorithms on existing datasets and our targeted HDR dataset.
How to Train Your Event Camera Neural Network
Apr 09, 2020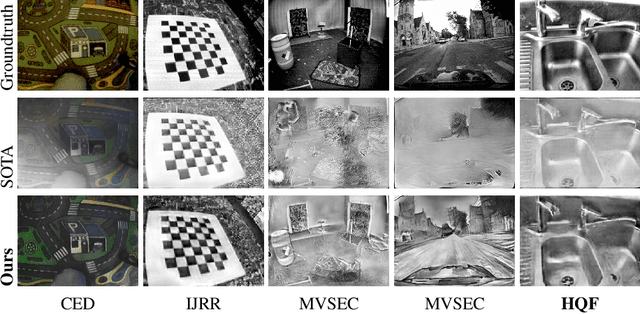
Event cameras are paradigm-shifting novel sensors that report asynchronous, per-pixel brightness changes called 'events' with unparalleled low latency. This makes them ideal for high speed, high dynamic range scenes where conventional cameras would fail. Recent work has demonstrated impressive results using Convolutional Neural Networks (CNNs) for video reconstruction and optic flow with events. We present strategies for improving training data for event based CNNs that result in 25-40% boost in performance of existing state-of-the-art (SOTA) video reconstruction networks retrained with our method, and up to 80% for optic flow networks. A challenge in evaluating event based video reconstruction is lack of quality groundtruth images in existing datasets. To address this, we present a new High Quality Frames (HQF) dataset, containing events and groundtruth frames from a DAVIS240C that are well-exposed and minimally motion-blurred. We evaluate our method on HQF + several existing major event camera datasets.
CED: Color Event Camera Dataset
Apr 24, 2019

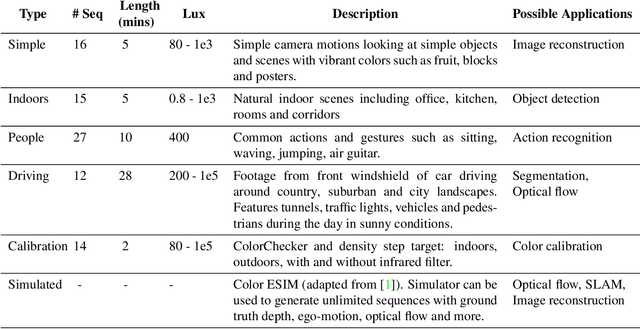
Event cameras are novel, bio-inspired visual sensors, whose pixels output asynchronous and independent timestamped spikes at local intensity changes, called 'events'. Event cameras offer advantages over conventional frame-based cameras in terms of latency, high dynamic range (HDR) and temporal resolution. Until recently, event cameras have been limited to outputting events in the intensity channel, however, recent advances have resulted in the development of color event cameras, such as the Color-DAVIS346. In this work, we present and release the first Color Event Camera Dataset (CED), containing 50 minutes of footage with both color frames and events. CED features a wide variety of indoor and outdoor scenes, which we hope will help drive forward event-based vision research. We also present an extension of the event camera simulator ESIM that enables simulation of color events. Finally, we present an evaluation of three state-of-the-art image reconstruction methods that can be used to convert the Color-DAVIS346 into a continuous-time, HDR, color video camera to visualise the event stream, and for use in downstream vision applications.
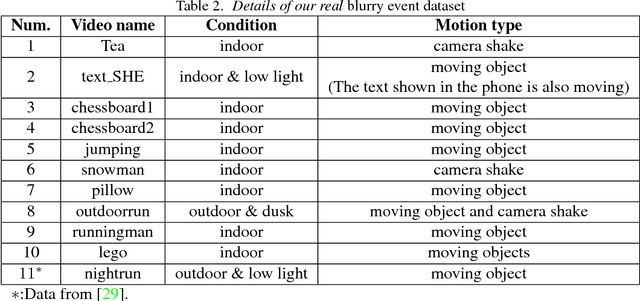
Bringing Blurry Alive at High Frame-Rate with an Event Camera
Mar 12, 2019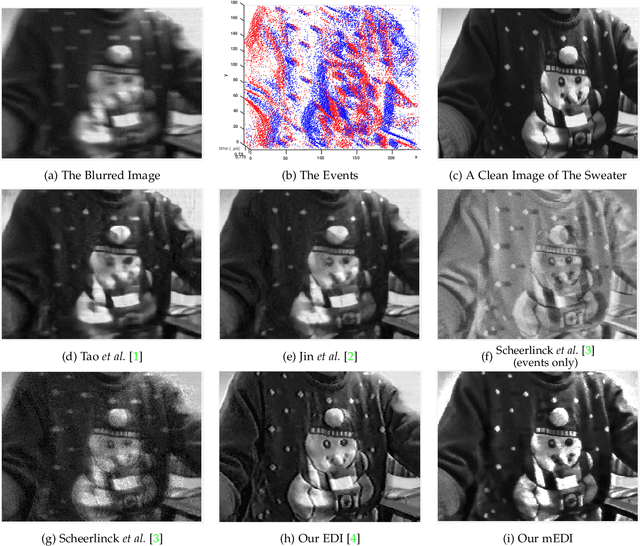
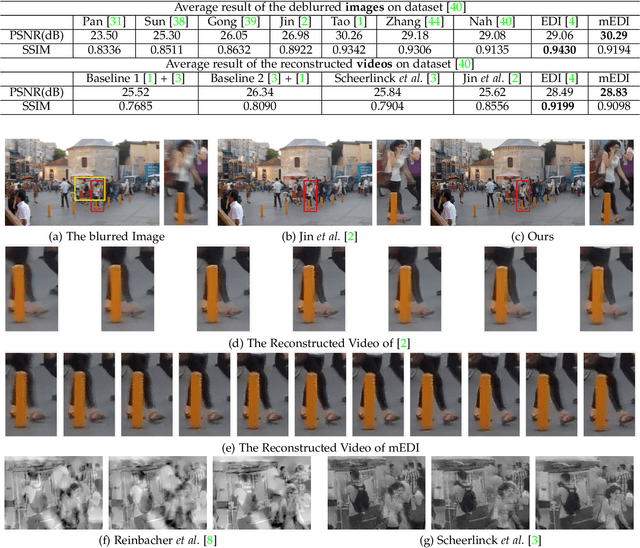
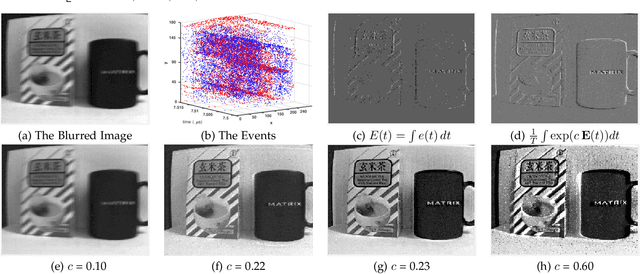

Event-based cameras can measure intensity changes (called `{\it events}') with microsecond accuracy under high-speed motion and challenging lighting conditions. With the active pixel sensor (APS), the event camera allows simultaneous output of the intensity frames. However, the output images are captured at a relatively low frame-rate and often suffer from motion blur. A blurry image can be regarded as the integral of a sequence of latent images, while the events indicate the changes between the latent images. Therefore, we are able to model the blur-generation process by associating event data to a latent image. Based on the abundant event data and the low frame-rate easily blurred images, we propose a simple and effective approach to reconstruct a high-quality and high frame-rate shape video. Starting with a single blurry frame and its event data, we propose the \textbf{Event-based Double Integral (EDI)} model. Then, we extend it to \textbf{ multiple Event-based Double Integral (mEDI)} model to get more smooth and convincing results based on multiple images and their events. We also provide an efficient solver to minimize the proposed energy model. By optimizing the energy model, we achieve significant improvements in removing general blurs and reconstructing high temporal resolution video. The video generation is based on solving a simple non-convex optimization problem in a single scalar variable. Experimental results on both synthetic and real images demonstrate the superiority of our mEDI model and optimization method in comparison to the state-of-the-art.
Computing Spatial Image Convolutions for Event Cameras
Jan 14, 2019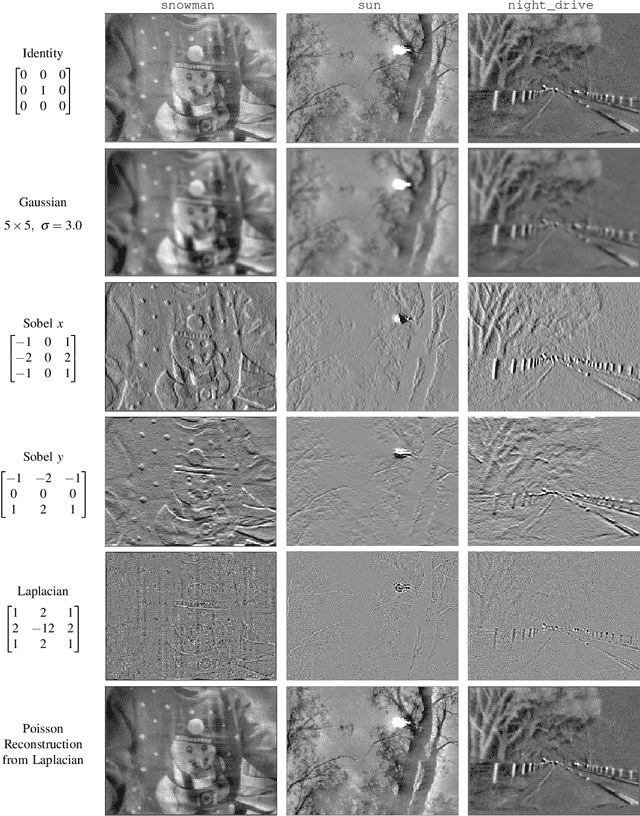
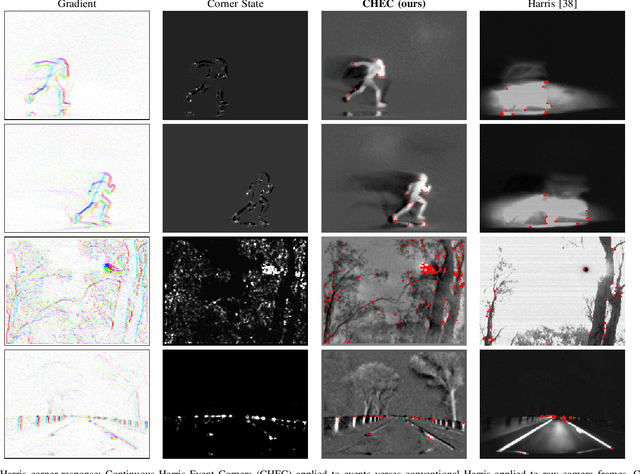
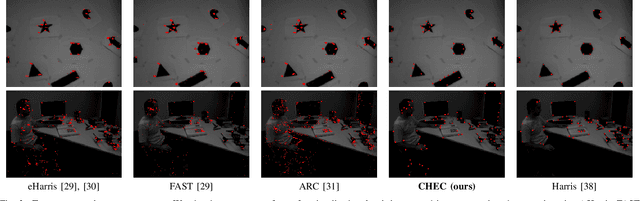
Spatial convolution is arguably the most fundamental of 2D image processing operations. Conventional spatial image convolution can only be applied to a conventional image, that is, an array of pixel values (or similar image representation) that are associated with a single instant in time. Event cameras have serial, asynchronous output with no natural notion of an image frame, and each event arrives with a different timestamp. In this paper, we propose a method to compute the convolution of a linear spatial kernel with the output of an event camera. The approach operates on the event stream output of the camera directly without synthesising pseudo-image frames as is common in the literature. The key idea is the introduction of an internal state that directly encodes the convolved image information, which is updated asynchronously as each event arrives from the camera. The state can be read-off as-often-as and whenever required for use in higher level vision algorithms for real-time robotic systems. We demonstrate the application of our method to corner detection, providing an implementation of a Harris corner-response 'state' that can be used in real-time for feature detection and tracking on robotic systems.
Bringing a Blurry Frame Alive at High Frame-Rate with an Event Camera
Nov 27, 2018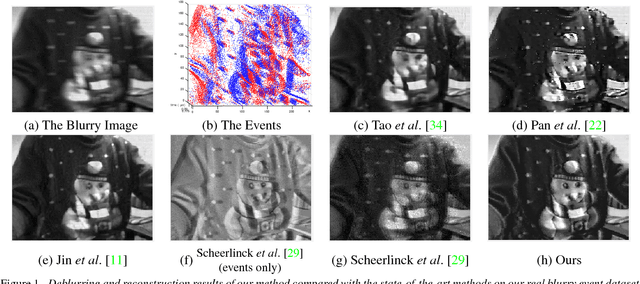


Event-based cameras can measure intensity changes (called `{\it events}') with microsecond accuracy under high-speed motion and challenging lighting conditions. With the active pixel sensor (APS), the event camera allows simultaneous output of the intensity frames. However, the output images are captured at a relatively low frame-rate and often suffer from motion blur. A blurry image can be regarded as the integral of a sequence of latent images, while the events indicate the changes between the latent images. Therefore, we are able to model the blur-generation process by associating event data to a latent image. In this paper, we propose a simple and effective approach, the \textbf{Event-based Double Integral (EDI)} model, to reconstruct a high frame-rate, sharp video from a single blurry frame and its event data. The video generation is based on solving a simple non-convex optimization problem in a single scalar variable. Experimental results on both synthetic and real images demonstrate the superiority of our EDI model and optimization method in comparison to the state-of-the-art.
Continuous-time Intensity Estimation Using Event Cameras
Nov 01, 2018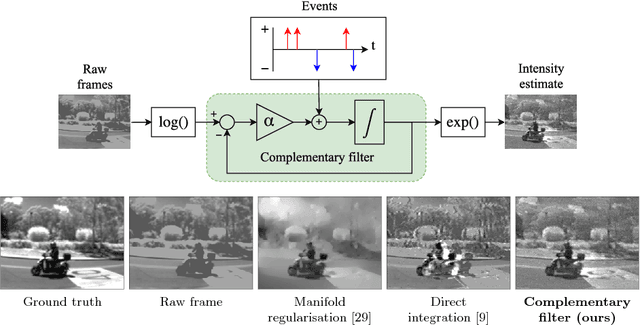

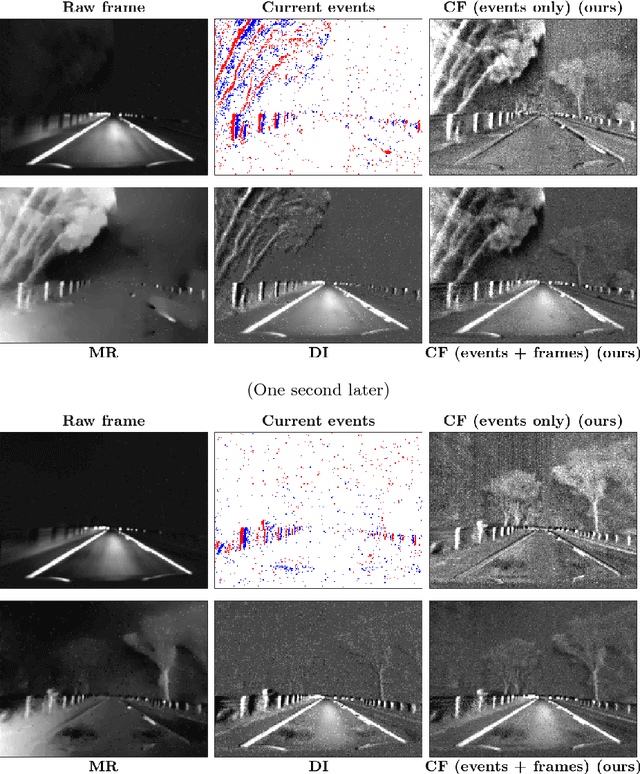
Event cameras provide asynchronous, data-driven measurements of local temporal contrast over a large dynamic range with extremely high temporal resolution. Conventional cameras capture low-frequency reference intensity information. These two sensor modalities provide complementary information. We propose a computationally efficient, asynchronous filter that continuously fuses image frames and events into a single high-temporal-resolution, high-dynamic-range image state. In absence of conventional image frames, the filter can be run on events only. We present experimental results on high-speed, high-dynamic-range sequences, as well as on new ground truth datasets we generate to demonstrate the proposed algorithm outperforms existing state-of-the-art methods.