 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Speed and High Dynamic Range Video with an Event Camera
Jun 15, 2019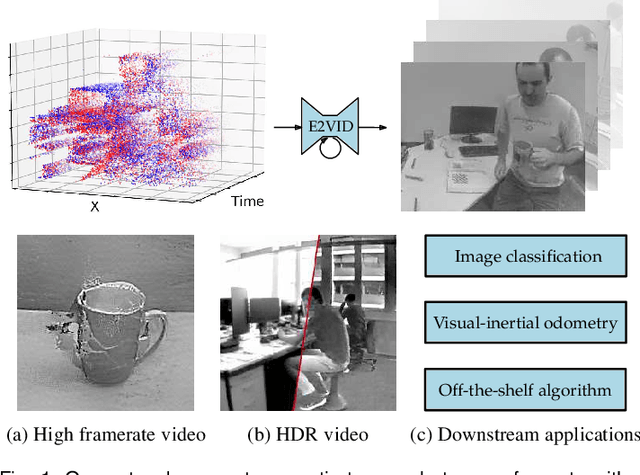
Event cameras are novel sensors that report brightness changes in the form of a stream of asynchronous "events" instead of intensity frames. They offer significant advantages with respect to conventional cameras: high temporal resolution, high dynamic range, and no motion blur. While the stream of events encodes in principle the complete visual signal, the reconstruction of an intensity image from a stream of events is an ill-posed problem in practice. Existing reconstruction approaches are based on hand-crafted priors and strong assumptions about the imaging process as well as the statistics of natural images. In this work we propose to learn to reconstruct intensity images from event streams directly from data instead of relying on any hand-crafted priors. We propose a novel recurrent network to reconstruct videos from a stream of events, and train it on a large amount of simulated event data. During training we propose to use a perceptual loss to encourage reconstructions to follow natural image statistics. We further extend our approach to synthesize color images from color event streams. Our network surpasses state-of-the-art reconstruction methods by a large margin in terms of image quality (> 20%), while comfortably running in real-time. We show that the network is able to synthesize high framerate videos (> 5,000 frames per second) of high-speed phenomena (e.g. a bullet hitting an object) and is able to provide high dynamic range reconstructions in challenging lighting conditions. We also demonstrate the effectiveness of our reconstructions as an intermediate representation for event data. We show that off-the-shelf computer vision algorithms can be applied to our reconstructions for tasks such as object classification and visual-inertial odometry and that this strategy consistently outperforms algorithms that were specifically designed for event data.
CED: Color Event Camera Dataset
Apr 24, 2019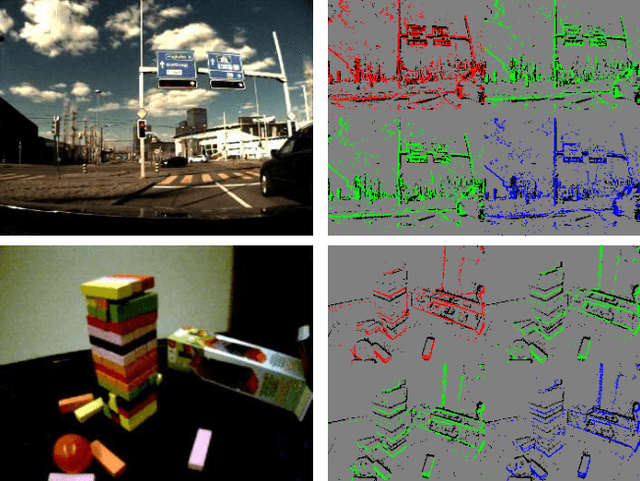
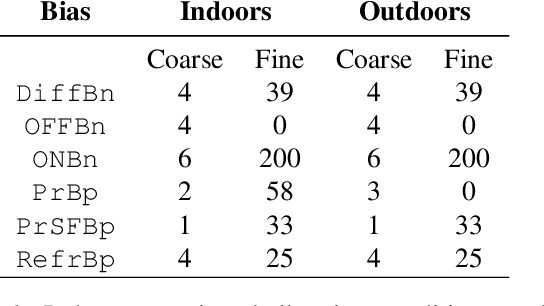

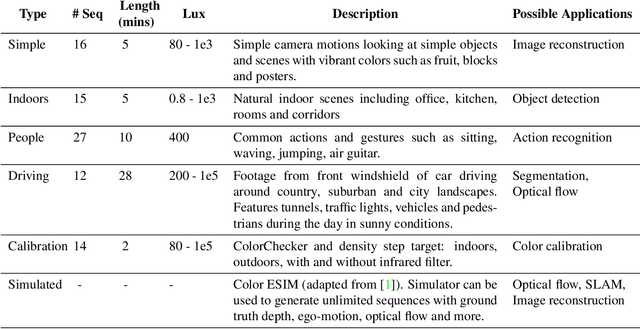
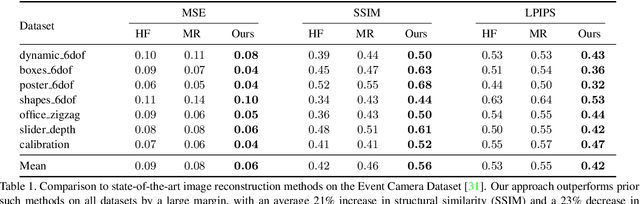
Event cameras are novel, bio-inspired visual sensors, whose pixels output asynchronous and independent timestamped spikes at local intensity changes, called 'events'. Event cameras offer advantages over conventional frame-based cameras in terms of latency, high dynamic range (HDR) and temporal resolution. Until recently, event cameras have been limited to outputting events in the intensity channel, however, recent advances have resulted in the development of color event cameras, such as the Color-DAVIS346. In this work, we present and release the first Color Event Camera Dataset (CED), containing 50 minutes of footage with both color frames and events. CED features a wide variety of indoor and outdoor scenes, which we hope will help drive forward event-based vision research. We also present an extension of the event camera simulator ESIM that enables simulation of color events. Finally, we present an evaluation of three state-of-the-art image reconstruction methods that can be used to convert the Color-DAVIS346 into a continuous-time, HDR, color video camera to visualise the event stream, and for use in downstream vision applications.
Events-to-Video: Bringing Modern Computer Vision to Event Cameras
Apr 17, 2019
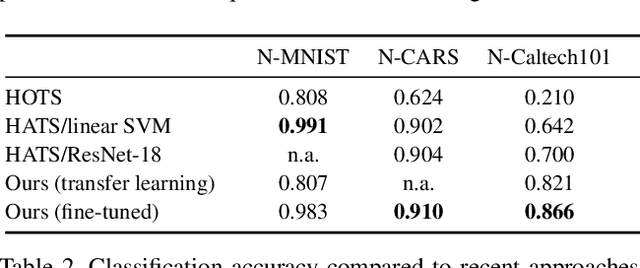
Event cameras are novel sensors that report brightness changes in the form of asynchronous "events" instead of intensity frames. They have significant advantages over conventional cameras: high temporal resolution, high dynamic range, and no motion blur. Since the output of event cameras is fundamentally different from conventional cameras, it is commonly accepted that they require the development of specialized algorithms to accommodate the particular nature of events. In this work, we take a different view and propose to apply existing, mature computer vision techniques to videos reconstructed from event data. We propose a novel recurrent network to reconstruct videos from a stream of events, and train it on a large amount of simulated event data. Our experiments show that our approach surpasses state-of-the-art reconstruction methods by a large margin (> 20%) in terms of image quality. We further apply off-the-shelf computer vision algorithms to videos reconstructed from event data on tasks such as object classification and visual-inertial odometry, and show that this strategy consistently outperforms algorithms that were specifically designed for event data. We believe that our approach opens the door to bringing the outstanding properties of event cameras to an entirely new range of tasks. A video of the experiments is available at https://youtu.be/IdYrC4cUO0I
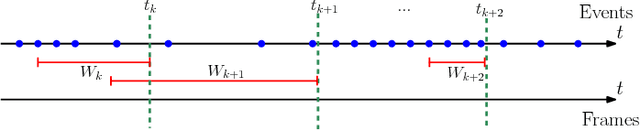
Asynchronous, Photometric Feature Tracking using Events and Frames
Jul 25, 2018

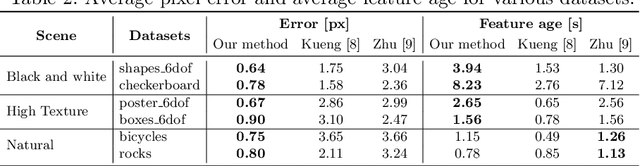
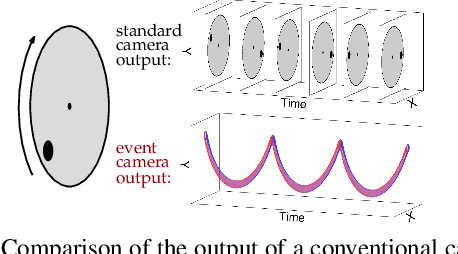
We present a method that leverages the complementarity of event cameras and standard cameras to track visual features with low-latency. Event cameras are novel sensors that output pixel-level brightness changes, called "events". They offer significant advantages over standard cameras, namely a very high dynamic range, no motion blur, and a latency in the order of microseconds. However, because the same scene pattern can produce different events depending on the motion direction, establishing event correspondences across time is challenging. By contrast, standard cameras provide intensity measurements (frames) that do not depend on motion direction. Our method extracts features on frames and subsequently tracks them asynchronously using events, thereby exploiting the best of both types of data: the frames provide a photometric representation that does not depend on motion direction and the events provide low-latency updates. In contrast to previous works, which are based on heuristics, this is the first principled method that uses raw intensity measurements directly, based on a generative event model within a maximum-likelihood framework. As a result, our method produces feature tracks that are both more accurate (subpixel accuracy) and longer than the state of the art, across a wide variety of scenes.
* 22 pages, 15 figures, Video: https://youtu.be/A7UfeUnG6c4
Semi-Dense 3D Reconstruction with a Stereo Event Camera
Jul 19, 2018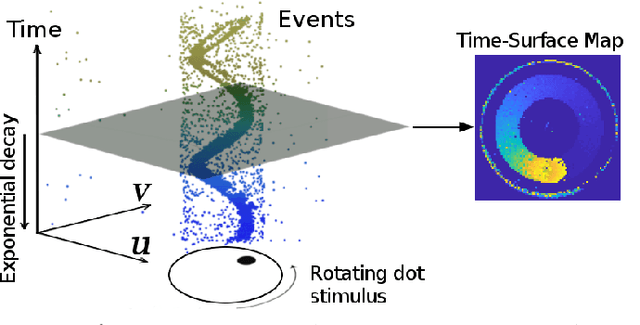
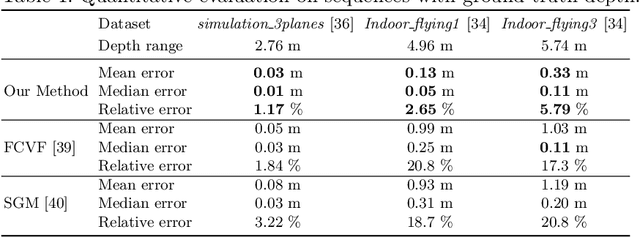
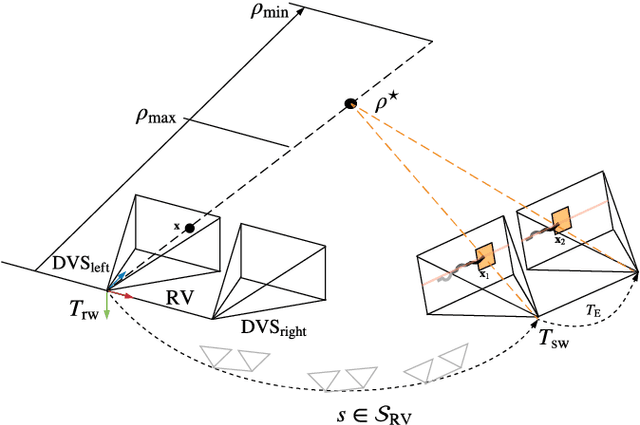
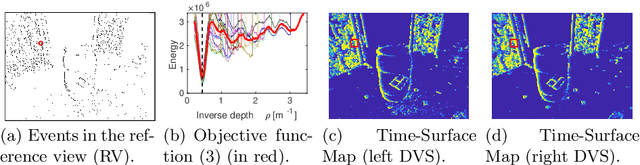
Event cameras are bio-inspired sensors that offer several advantages, such as low latency, high-speed and high dynamic range, to tackle challenging scenarios in computer vision. This paper presents a solution to the problem of 3D reconstruction from data captured by a stereo event-camera rig moving in a static scene, such as in the context of stereo Simultaneous Localization and Mapping. The proposed method consists of the optimization of an energy function designed to exploit small-baseline spatio-temporal consistency of events triggered across both stereo image planes. To improve the density of the reconstruction and to reduce the uncertainty of the estimation, a probabilistic depth-fusion strategy is also developed. The resulting method has no special requirements on either the motion of the stereo event-camera rig or on prior knowledge about the scene. Experiments demonstrate our method can deal with both texture-rich scenes as well as sparse scenes, outperforming state-of-the-art stereo methods based on event data image representations.
* 19 pages, 8 figures, Video: https://youtu.be/Qrnpj2FD1e4
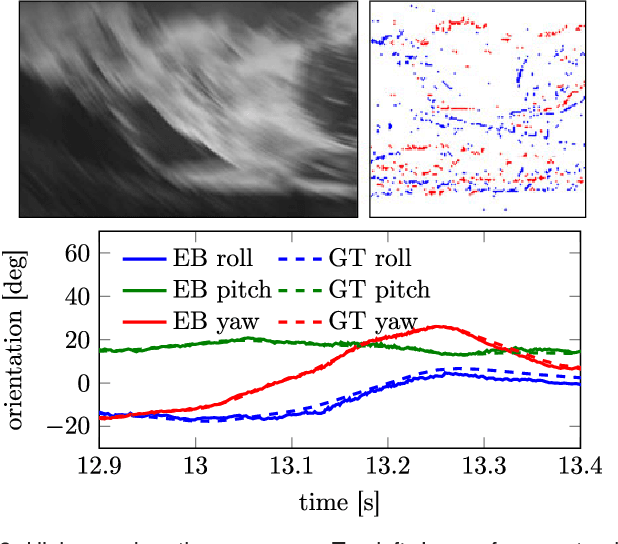
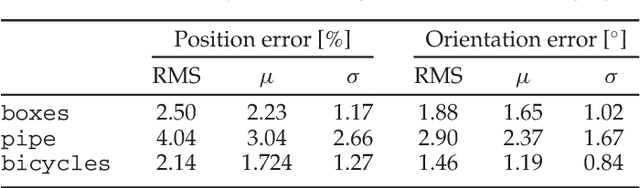
Continuous-Time Visual-Inertial Odometry for Event Cameras
Jun 10, 2018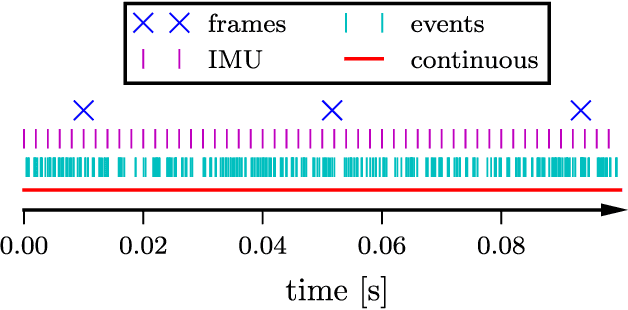
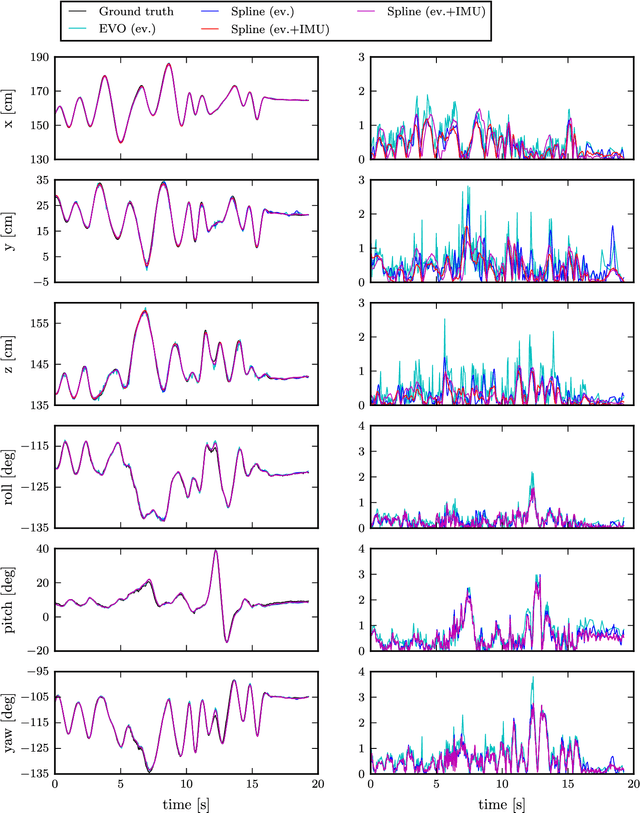
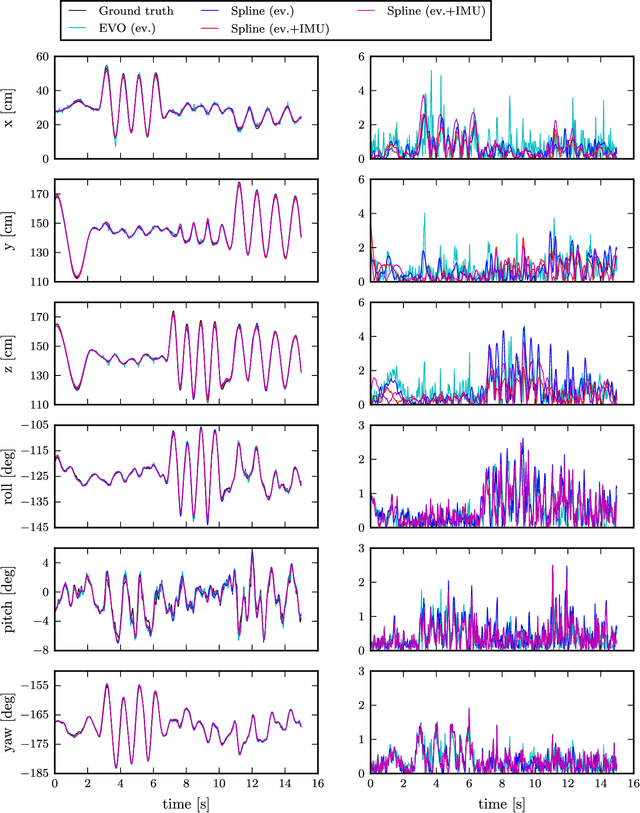
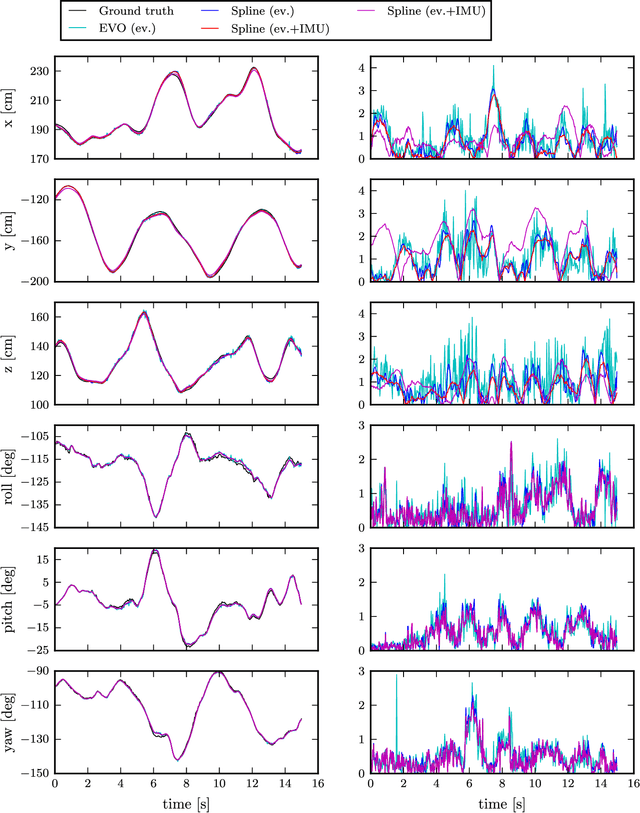
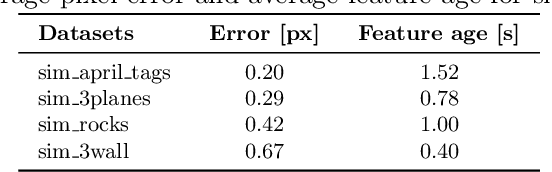
Event cameras are bio-inspired vision sensors that output pixel-level brightness changes instead of standard intensity frames. They offer significant advantages over standard cameras, namely a very high dynamic range, no motion blur, and a latency in the order of microseconds. However, due to the fundamentally different structure of the sensor's output, new algorithms that exploit the high temporal resolution and the asynchronous nature of the sensor are required. Recent work has shown that a continuous-time representation of the event camera pose can deal with the high temporal resolution and asynchronous nature of this sensor in a principled way. In this paper, we leverage such a continuous-time representation to perform visual-inertial odometry with an event camera. This representation allows direct integration of the asynchronous events with micro-second accuracy and the inertial measurements at high frequency. The event camera trajectory is approximated by a smooth curve in the space of rigid-body motions using cubic splines. This formulation significantly reduces the number of variables in trajectory estimation problems. We evaluate our method on real data from several scenes and compare the results against ground truth from a motion-capture system. We show that our method provides improved accuracy over the result of a state-of-the-art visual odometry method for event cameras. We also show that both the map orientation and scale can be recovered accurately by fusing events and inertial data. To the best of our knowledge, this is the first work on visual-inertial fusion with event cameras using a continuous-time framework.
A Unifying Contrast Maximization Framework for Event Cameras, with Applications to Motion, Depth, and Optical Flow Estimation
Apr 04, 2018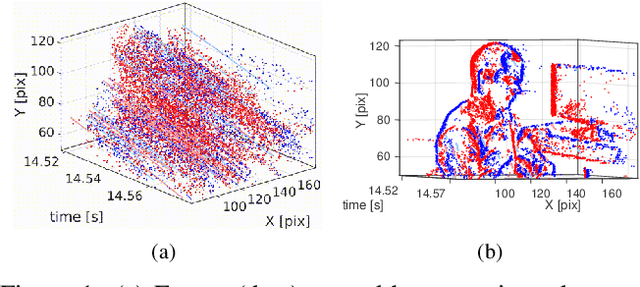
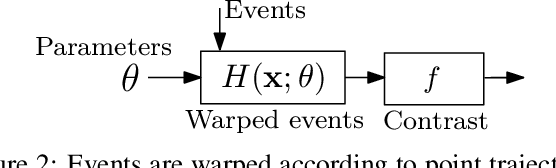
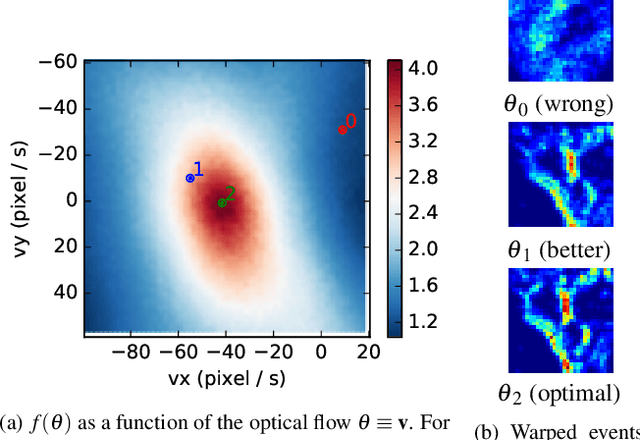
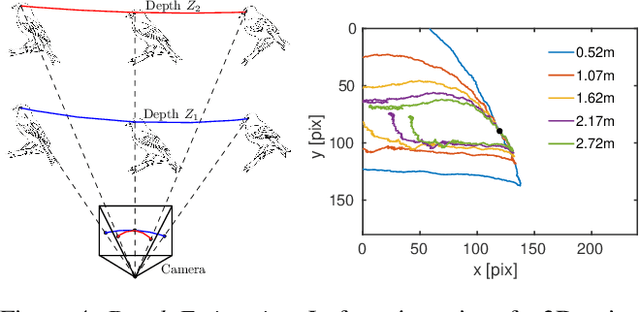
We present a unifying framework to solve several computer vision problems with event cameras: motion, depth and optical flow estimation. The main idea of our framework is to find the point trajectories on the image plane that are best aligned with the event data by maximizing an objective function: the contrast of an image of warped events. Our method implicitly handles data association between the events, and therefore, does not rely on additional appearance information about the scene. In addition to accurately recovering the motion parameters of the problem, our framework produces motion-corrected edge-like images with high dynamic range that can be used for further scene analysis. The proposed method is not only simple, but more importantly, it is, to the best of our knowledge, the first method that can be successfully applied to such a diverse set of important vision tasks with event cameras.
* 16 pages, 16 figures. Video: https://youtu.be/KFMZFhi-9Aw
Ultimate SLAM? Combining Events, Images, and IMU for Robust Visual SLAM in HDR and High Speed Scenarios
Jan 22, 2018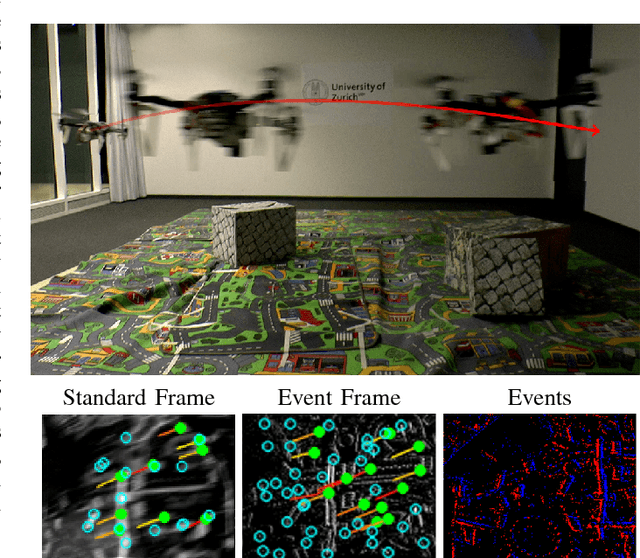
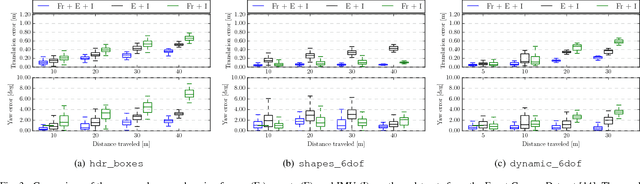
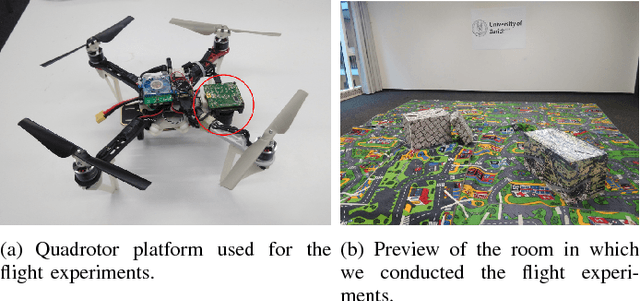
Event cameras are bio-inspired vision sensors that output pixel-level brightness changes instead of standard intensity frames. These cameras do not suffer from motion blur and have a very high dynamic range, which enables them to provide reliable visual information during high speed motions or in scenes characterized by high dynamic range. However, event cameras output only little information when the amount of motion is limited, such as in the case of almost still motion. Conversely, standard cameras provide instant and rich information about the environment most of the time (in low-speed and good lighting scenarios), but they fail severely in case of fast motions, or difficult lighting such as high dynamic range or low light scenes. In this paper, we present the first state estimation pipeline that leverages the complementary advantages of these two sensors by fusing in a tightly-coupled manner events, standard frames, and inertial measurements. We show on the publicly available Event Camera Dataset that our hybrid pipeline leads to an accuracy improvement of 130% over event-only pipelines, and 85% over standard-frames-only visual-inertial systems, while still being computationally tractable. Furthermore, we use our pipeline to demonstrate - to the best of our knowledge - the first autonomous quadrotor flight using an event camera for state estimation, unlocking flight scenarios that were not reachable with traditional visual-inertial odometry, such as low-light environments and high-dynamic range scenes.
* 8 pages, 9 figures, 2 tables
The Event-Camera Dataset and Simulator: Event-based Data for Pose Estimation, Visual Odometry, and SLAM
Nov 08, 2017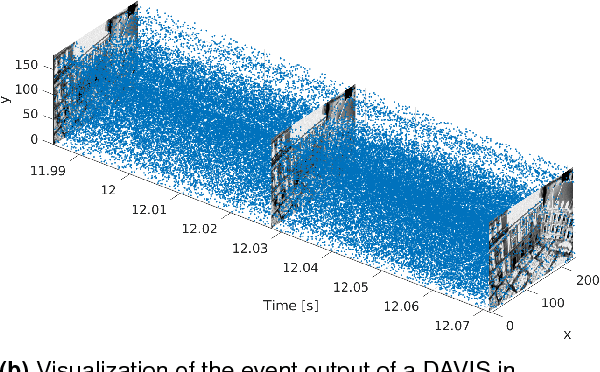

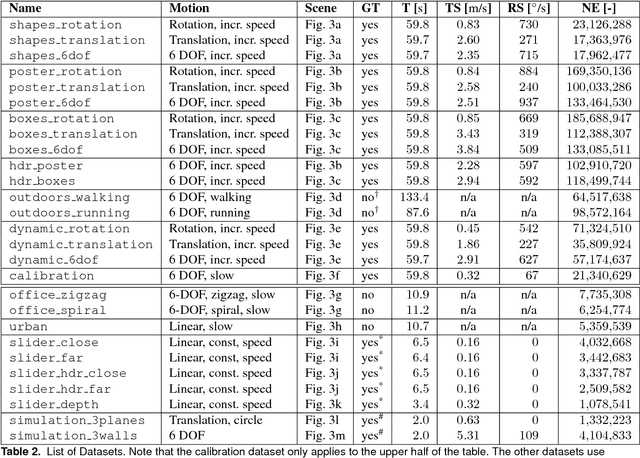
New vision sensors, such as the Dynamic and Active-pixel Vision sensor (DAVIS), incorporate a conventional global-shutter camera and an event-based sensor in the same pixel array. These sensors have great potential for high-speed robotics and computer vision because they allow us to combine the benefits of conventional cameras with those of event-based sensors: low latency, high temporal resolution, and very high dynamic range. However, new algorithms are required to exploit the sensor characteristics and cope with its unconventional output, which consists of a stream of asynchronous brightness changes (called "events") and synchronous grayscale frames. For this purpose, we present and release a collection of datasets captured with a DAVIS in a variety of synthetic and real environments, which we hope will motivate research on new algorithms for high-speed and high-dynamic-range robotics and computer-vision applications. In addition to global-shutter intensity images and asynchronous events, we provide inertial measurements and ground-truth camera poses from a motion-capture system. The latter allows comparing the pose accuracy of ego-motion estimation algorithms quantitatively. All the data are released both as standard text files and binary files (i.e., rosbag). This paper provides an overview of the available data and describes a simulator that we release open-source to create synthetic event-camera data.
* 7 pages, 4 figures, 3 tables
Event-based, 6-DOF Camera Tracking from Photometric Depth Maps
Oct 31, 2017
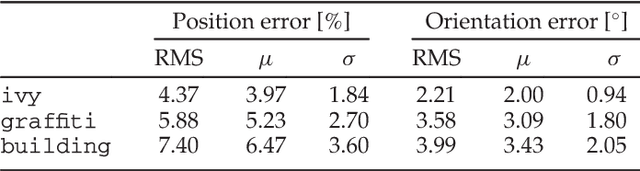
Event cameras are bio-inspired vision sensors that output pixel-level brightness changes instead of standard intensity frames. These cameras do not suffer from motion blur and have a very high dynamic range, which enables them to provide reliable visual information during high-speed motions or in scenes characterized by high dynamic range. These features, along with a very low power consumption, make event cameras an ideal complement to standard cameras for VR/AR and video game applications. With these applications in mind, this paper tackles the problem of accurate, low-latency tracking of an event camera from an existing photometric depth map (i.e., intensity plus depth information) built via classic dense reconstruction pipelines. Our approach tracks the 6-DOF pose of the event camera upon the arrival of each event, thus virtually eliminating latency. We successfully evaluate the method in both indoor and outdoor scenes and show that---because of the technological advantages of the event camera---our pipeline works in scenes characterized by high-speed motion, which are still unaccessible to standard cameras.
* 12 pages, 13 figures. 2 tables. (in press)