 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous-Time Visual-Inertial Odometry for Event Cameras
Paper and Code
Jun 10, 2018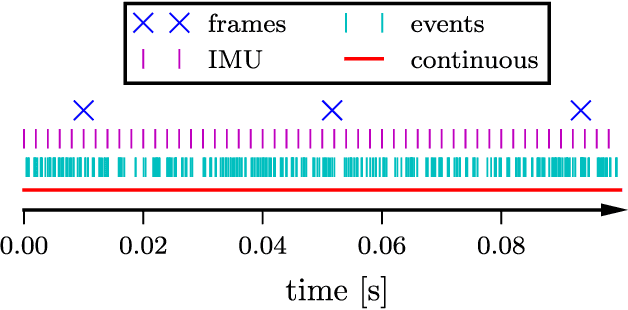
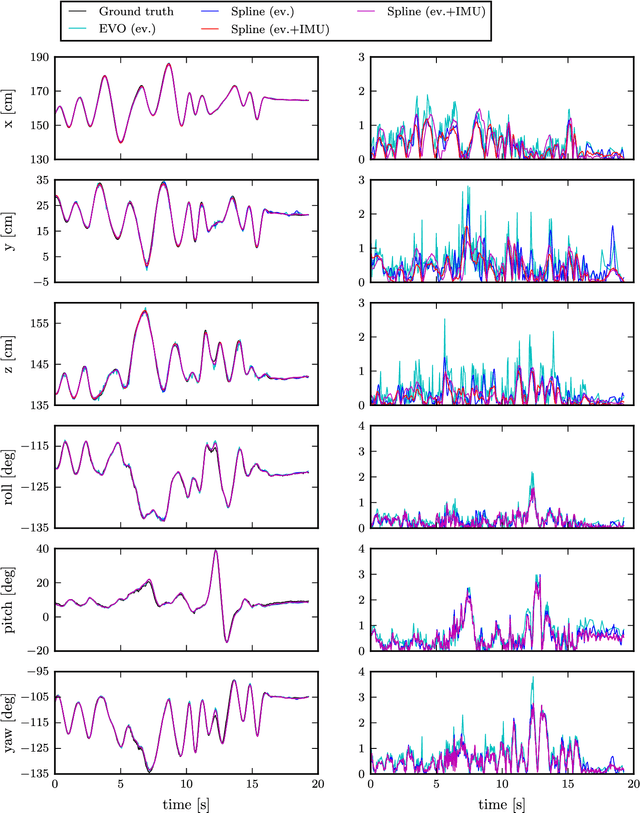
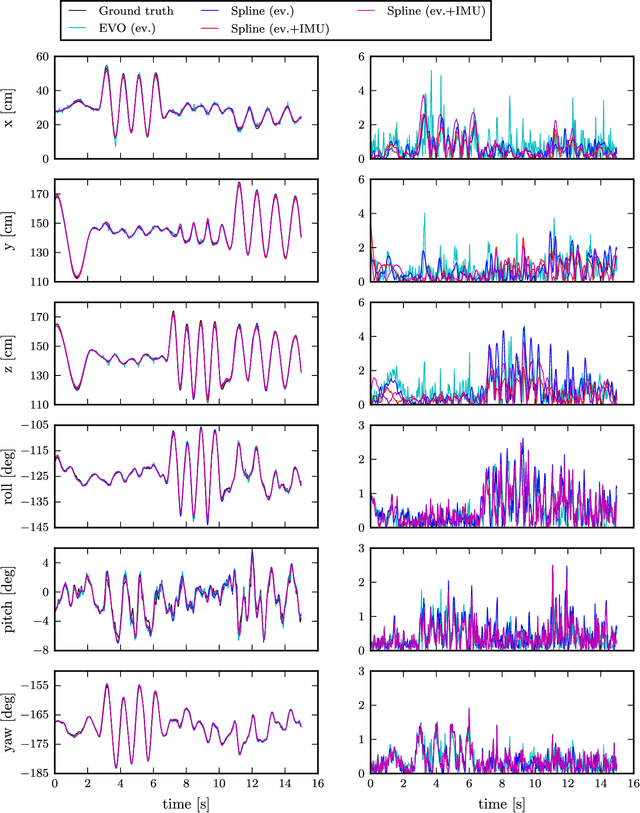
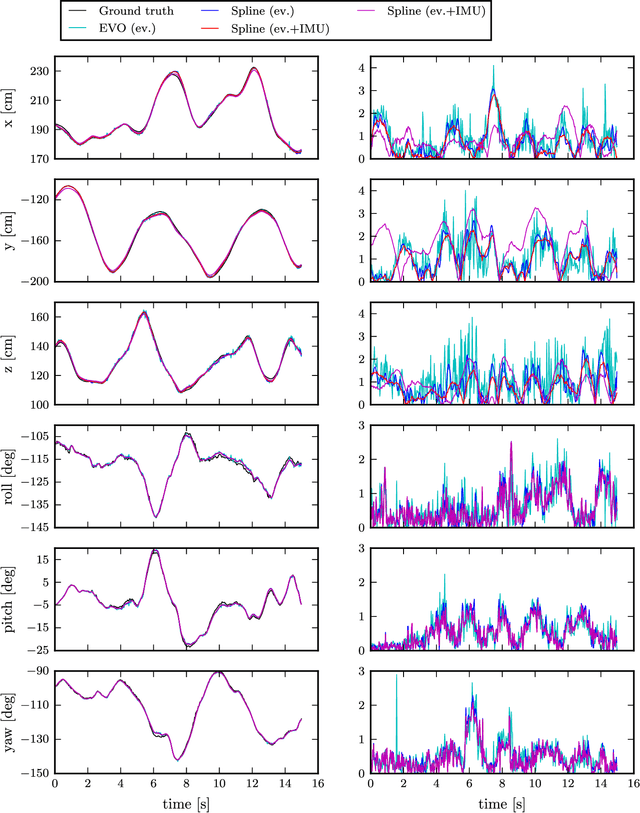
Event cameras are bio-inspired vision sensors that output pixel-level brightness changes instead of standard intensity frames. They offer significant advantages over standard cameras, namely a very high dynamic range, no motion blur, and a latency in the order of microseconds. However, due to the fundamentally different structure of the sensor's output, new algorithms that exploit the high temporal resolution and the asynchronous nature of the sensor are required. Recent work has shown that a continuous-time representation of the event camera pose can deal with the high temporal resolution and asynchronous nature of this sensor in a principled way. In this paper, we leverage such a continuous-time representation to perform visual-inertial odometry with an event camera. This representation allows direct integration of the asynchronous events with micro-second accuracy and the inertial measurements at high frequency. The event camera trajectory is approximated by a smooth curve in the space of rigid-body motions using cubic splines. This formulation significantly reduces the number of variables in trajectory estimation problems. We evaluate our method on real data from several scenes and compare the results against ground truth from a motion-capture system. We show that our method provides improved accuracy over the result of a state-of-the-art visual odometry method for event cameras. We also show that both the map orientation and scale can be recovered accurately by fusing events and inertial data. To the best of our knowledge, this is the first work on visual-inertial fusion with event cameras using a continuous-time framework.