 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unifying Contrast Maximization Framework for Event Cameras, with Applications to Motion, Depth, and Optical Flow Estimation
Paper and Code
Apr 04, 2018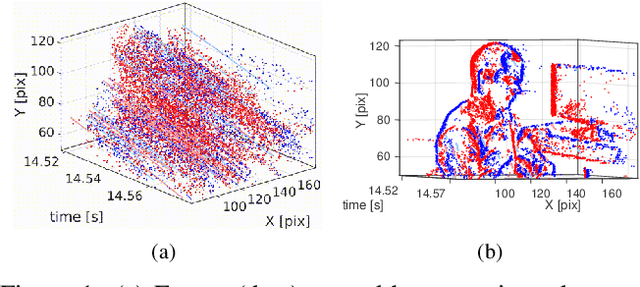
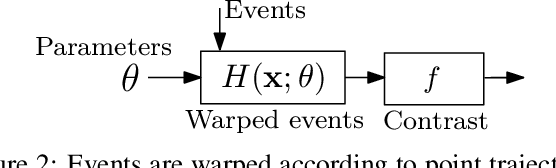
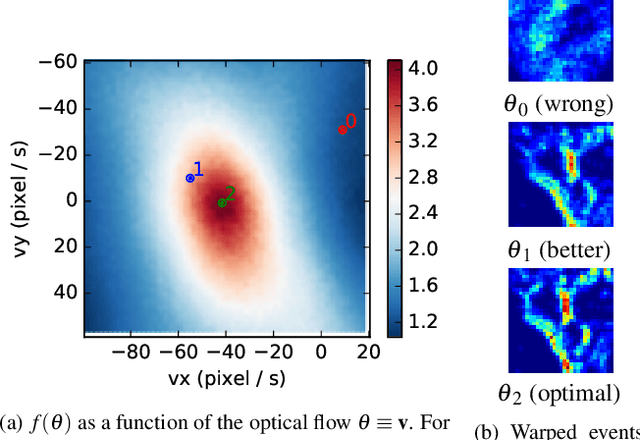
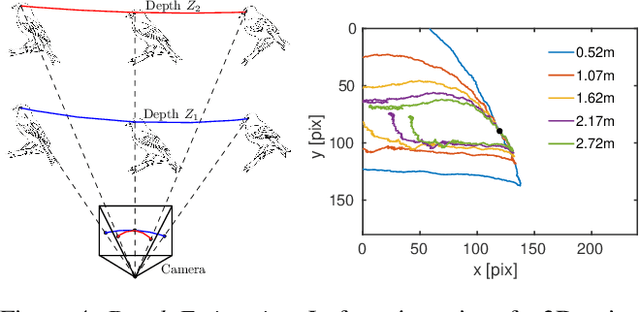
We present a unifying framework to solve several computer vision problems with event cameras: motion, depth and optical flow estimation. The main idea of our framework is to find the point trajectories on the image plane that are best aligned with the event data by maximizing an objective function: the contrast of an image of warped events. Our method implicitly handles data association between the events, and therefore, does not rely on additional appearance information about the scene. In addition to accurately recovering the motion parameters of the problem, our framework produces motion-corrected edge-like images with high dynamic range that can be used for further scene analysis. The proposed method is not only simple, but more importantly, it is, to the best of our knowledge, the first method that can be successfully applied to such a diverse set of important vision tasks with event cameras.