 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Control of Redundant Hydraulic Manipulator Using Reinforcement Learning with Action Feedback
Apr 22, 2025



This article presents an entirely data-driven approach for autonomous control of redundant manipulators with hydraulic actuation. The approach only requires minimal system information, which is inherited from a simulation model. The non-linear hydraulic actuation dynamics are modeled using actuator networks from the data gathered during the manual operation of the manipulator to effectively emulate the real system in a simulation environment. A neural network control policy for autonomous control, based on end-effector (EE) position tracking is then learned using Reinforcement Learning (RL) with Ornstein-Uhlenbeck process noise (OUNoise) for efficient exploration. The RL agent also receives feedback based on supervised learning of the forward kinematics which facilitates selecting the best suitable action from exploration. The control policy directly provides the joint variables as outputs based on provided target EE position while taking into account the system dynamics. The joint variables are then mapped to the hydraulic valve commands, which are then fed to the system without further modifications. The proposed approach is implemented on a scaled hydraulic forwarder crane with three revolute and one prismatic joint to track the desired position of the EE in 3-Dimensional (3D) space. With the emulated dynamics and extensive learning in simulation, the results demonstrate the feasibility of deploying the learned controller directly on the real system.
Automated Code Generation and Validation for Software Components of Microcontrollers
Feb 26, 2025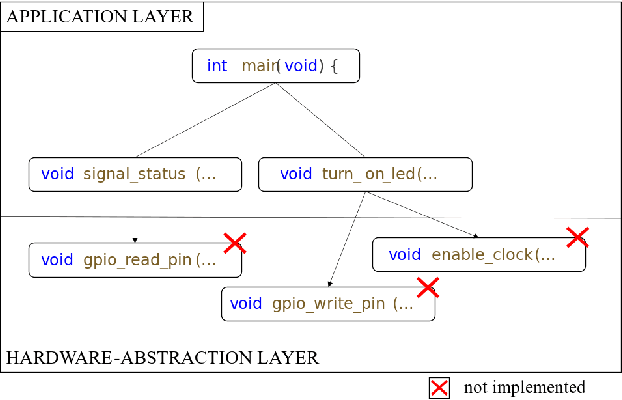



This paper proposes a method for generating software components for embedded systems, integrating seamlessly into existing implementations without developer intervention. We demonstrate this by automatically generating hardware abstraction layer (HAL) code for GPIO operations on the STM32F407 microcontroller. Using Abstract Syntax Trees (AST) for code analysis and Retrieval-Augmented Generation (RAG) for component generation, our approach enables autonomous code completion for embedded applications.
Semi-Autonomous Mobile Search and Rescue Robot for Radiation Disaster Scenarios
Jun 20, 2024This paper describes a novel semi-autonomous mobile robot system designed to assist search and rescue (SAR) first responders in disaster scenarios. While robots offer significant potential in SAR missions, current solutions are limited in their ability to handle a diverse range of tasks. This gap is addressed by presenting a system capable of (1) autonomous navigation and mapping, allowing the robot to autonomously explore and map areas affected by catastrophic events, (2) radiation mapping, enabling the system to triangulate a radiation map from discrete radiation measurements to aid in identifying hazardous areas, (3) semi-autonomous substance sampling, allowing the robot to collect samples of suspicious substances and analyze them onboard with immediate classification, and (4) valve manipulation, enabling teleoperated closing of valves that control hazardous material flow. This semi-autonomous approach balances human control over critical tasks like substance sampling with efficient robot navigation in low-risk areas. The system is evaluated during three trials that simulate possible disaster scenarios, two of which have been recorded during the European Robotics Hackathon (EnRicH). Furthermore, we provide recorded sensor data as well as the implemented software system as supplemental material through a GitHub repository: https://github.com/TW-Robotics/search-and-rescue-robot-IROS2024.
Overcoming Bias: Equivariant Filter Design for Biased Attitude Estimation with Online Calibration
Sep 24, 2022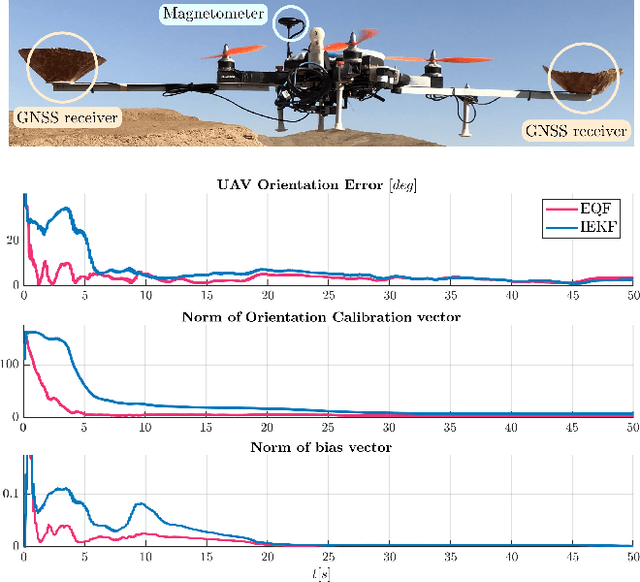
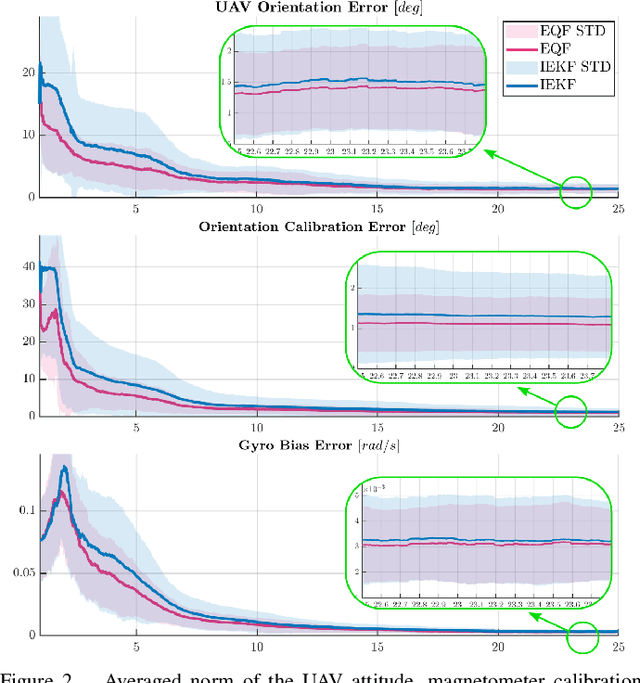
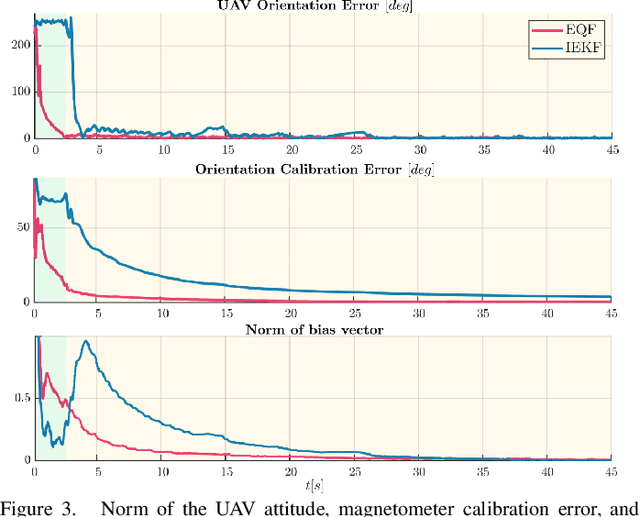
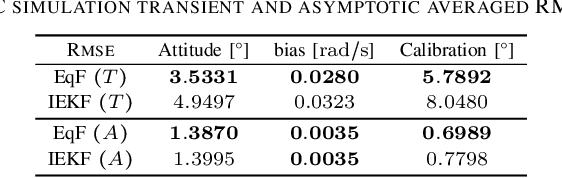
Stochastic filters for on-line state estimation are a core technology for autonomous systems. The performance of such filters is one of the key limiting factors to a system's capability. Both asymptotic behavior (e.g.,~for regular operation) and transient response (e.g.,~for fast initialization and reset) of such filters are of crucial importance in guaranteeing robust operation of autonomous systems. This paper introduces a new generic formulation for a gyroscope aided attitude estimator using N direction measurements including both body-frame and reference-frame direction type measurements. The approach is based on an integrated state formulation that incorporates navigation, extrinsic calibration for all direction sensors, and gyroscope bias states in a single equivariant geometric structure. This newly proposed symmetry allows modular addition of different direction measurements and their extrinsic calibration while maintaining the ability to include bias states in the same symmetry. The subsequently proposed filter-based estimator using this symmetry noticeably improves the transient response, and the asymptotic bias and extrinsic calibration estimation compared to state-of-the-art approaches. The estimator is verified in statistically representative simulations and is tested in real-world experiments.
COP: Control & Observability-aware Planning
Mar 14, 2022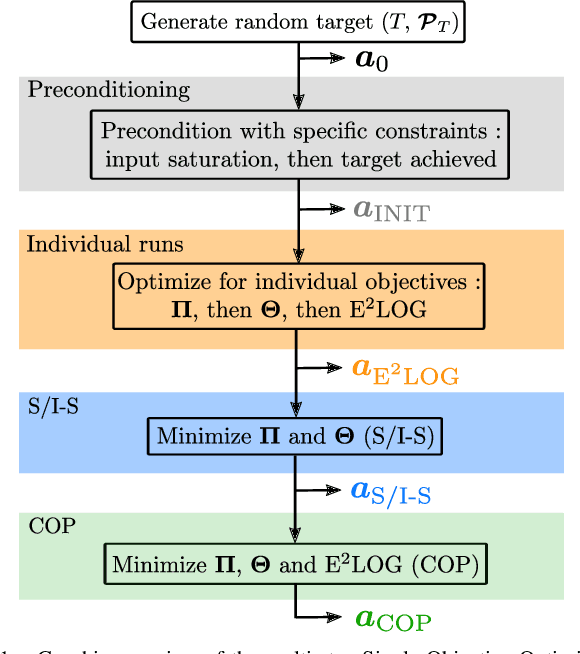
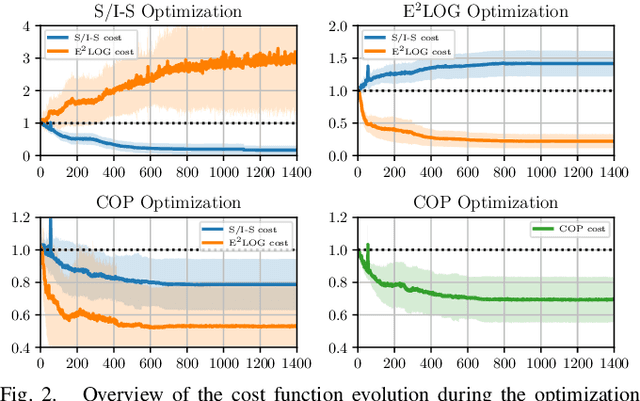
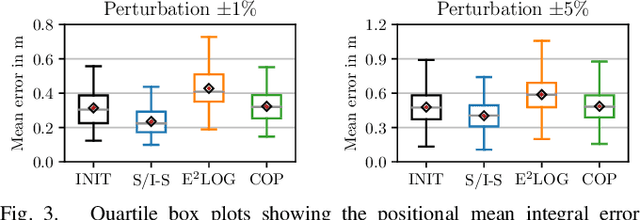
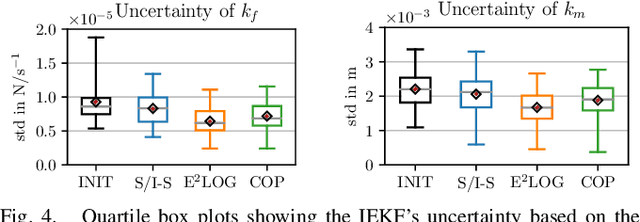
In this research, we aim to answer the question: How to combine Closed-Loop State and Input Sensitivity-based with Observability-aware trajectory planning? These possibly opposite optimization objectives can be used to improve trajectory control tracking and, at the same time, estimation performance. Our proposed novel Control & Observability-aware Planning (COP) framework is the first that uses these possibly opposing objectives in a Single-Objective Optimization Problem (SOOP) based on the Augmented Weighted Tchebycheff method to perform the balancing of them and generation of B\'ezier curve-based trajectories. Statistically relevant simulations for a 3D quadrotor unmanned aerial vehicle (UAV) case study produce results that support our claims and show the negative correlation between both objectives. We were able to reduce the positional mean integral error norm as well as the estimation uncertainty with the same trajectory to comparable levels of the trajectories optimized with individual objectives.
Depth-aware Object Segmentation and Grasp Detection for Robotic Picking Tasks
Nov 22, 2021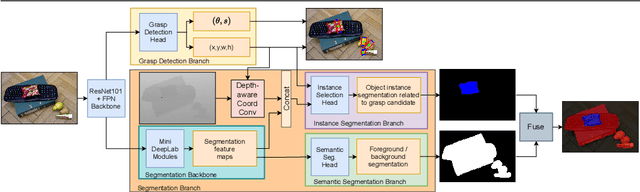

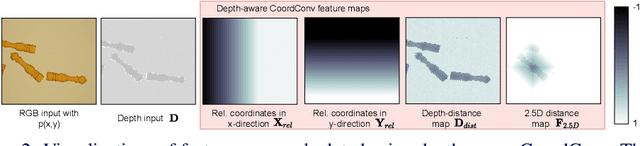
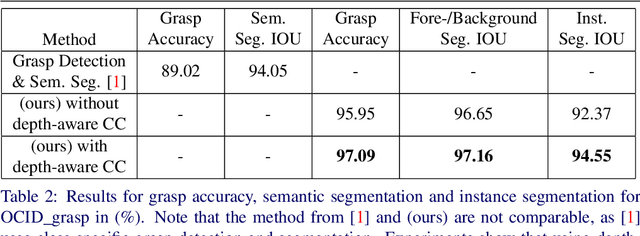
In this paper, we present a novel deep neural network architecture for joint class-agnostic object segmentation and grasp detection for robotic picking tasks using a parallel-plate gripper. We introduce depth-aware Coordinate Convolution (CoordConv), a method to increase accuracy for point proposal based object instance segmentation in complex scenes without adding any additional network parameters or computation complexity. Depth-aware CoordConv uses depth data to extract prior information about the location of an object to achieve highly accurate object instance segmentation. These resulting segmentation masks, combined with predicted grasp candidates, lead to a complete scene description for grasping using a parallel-plate gripper. We evaluate the accuracy of grasp detection and instance segmentation on challenging robotic picking datasets, namely Sil\'eane and OCID_grasp, and show the benefit of joint grasp detection and segmentation on a real-world robotic picking task.