 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-Autonomous Mobile Search and Rescue Robot for Radiation Disaster Scenarios
Jun 20, 2024This paper describes a novel semi-autonomous mobile robot system designed to assist search and rescue (SAR) first responders in disaster scenarios. While robots offer significant potential in SAR missions, current solutions are limited in their ability to handle a diverse range of tasks. This gap is addressed by presenting a system capable of (1) autonomous navigation and mapping, allowing the robot to autonomously explore and map areas affected by catastrophic events, (2) radiation mapping, enabling the system to triangulate a radiation map from discrete radiation measurements to aid in identifying hazardous areas, (3) semi-autonomous substance sampling, allowing the robot to collect samples of suspicious substances and analyze them onboard with immediate classification, and (4) valve manipulation, enabling teleoperated closing of valves that control hazardous material flow. This semi-autonomous approach balances human control over critical tasks like substance sampling with efficient robot navigation in low-risk areas. The system is evaluated during three trials that simulate possible disaster scenarios, two of which have been recorded during the European Robotics Hackathon (EnRicH). Furthermore, we provide recorded sensor data as well as the implemented software system as supplemental material through a GitHub repository: https://github.com/TW-Robotics/search-and-rescue-robot-IROS2024.
JKU-ITS Automobile for Research on Autonomous Vehicles
Jan 16, 2023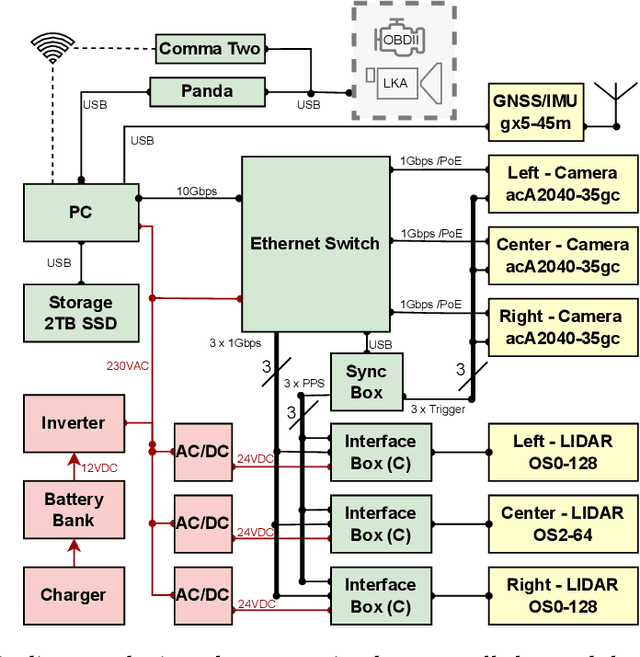
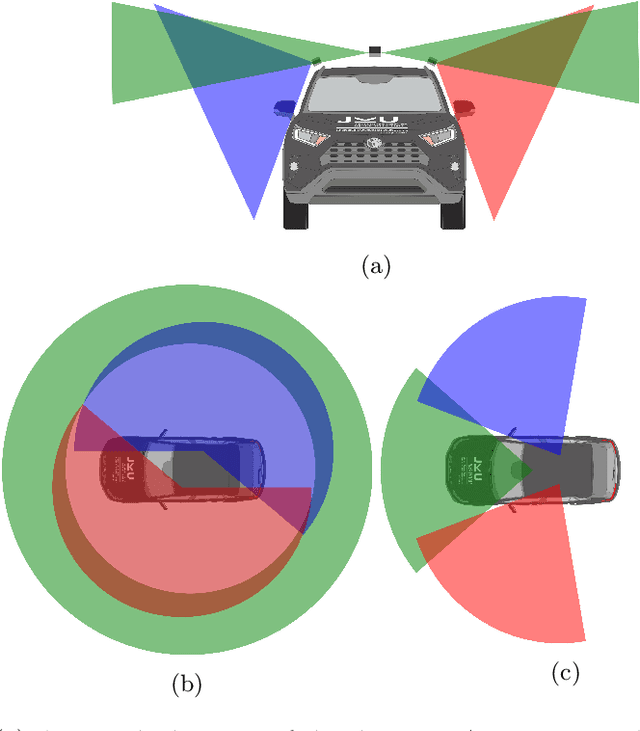

In this paper, we present our brand-new platform for Automated Driving research. The chosen vehicle is a RAV4 hybrid SUV from TOYOTA provided with exteroceptive sensors such as a multilayer LIDAR, a monocular camera, Radar and GPS; and proprioceptive sensors such as encoders and a 9-DOF IMU. These sensors are integrated in the vehicle via a main computer running ROS1 under Linux 20.04. Additionally, we installed an open-source ADAS called Comma Two, that runs Openpilot to control the vehicle. The platform is currently being used to research in the field of autonomous vehicles, human and autonomous vehicles interaction, human factors, and energy consumption.
Autonomous Vehicle Calibration via Linear Optimization
Apr 27, 2022
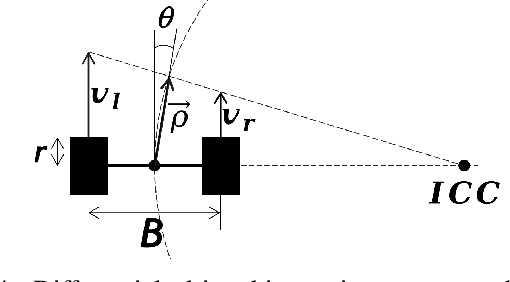
In navigation activities, kinematic parameters of a mobile vehicle play a significant role. Odometry is most commonly used for dead reckoning. However, the unrestricted accumulation of errors is a disadvantage using this method. As a result, it is necessary to calibrate odometry parameters to minimize the error accumulation. This paper presents a pipeline based on sequential least square programming to minimize the relative position displacement of an arbitrary landmark in consecutive time steps of a kinematic vehicle model by calibrating the parameters of applied model. Results showed that the developed pipeline produced accurate results with small datasets.
Mobile Delivery Robots: Mixed Reality-Based Simulation Relying on ROS and Unity 3D
Jun 16, 2020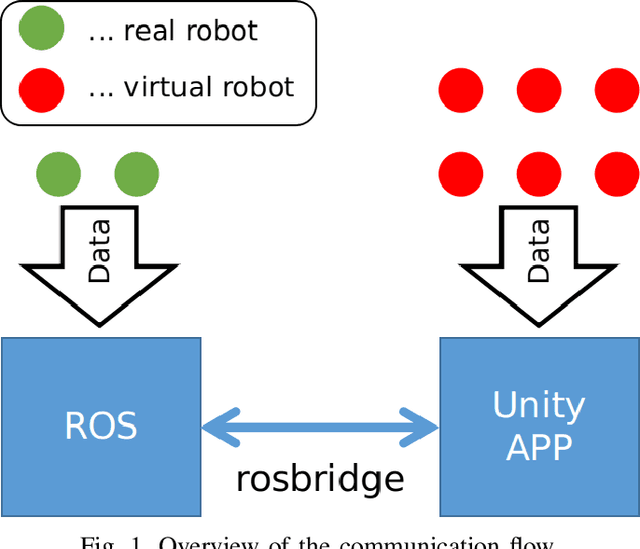
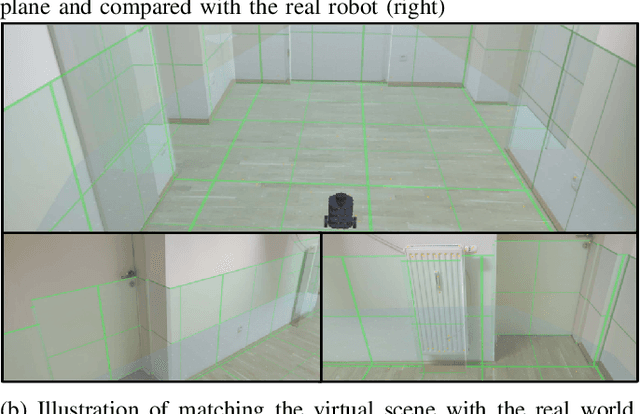
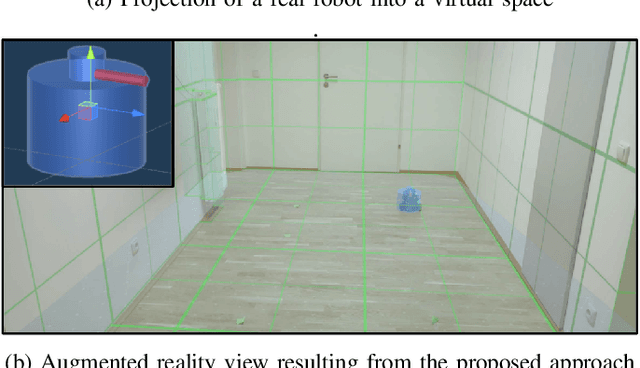

In the context of Intelligent Transportation Systems and the delivery of goods, new technology approaches need to be developed in order to cope with certain challenges that last mile delivery entails, such as navigation in an urban environment. Autonomous delivery robots can help overcome these challenges. We propose a method for performing mixed reality (MR) simulation with ROS-based robots using Unity, which synchronizes the real and virtual environment, and simultaneously uses the sensor information of the real robots to locate themselves and project them into the virtual environment, so that they can use their virtual doppelganger to perceive the virtual world. Using this method, real and virtual robots can perceive each other and the environment in which the other party is located, thereby enabling the exchange of information between virtual and real objects. Through this approach a more realistic and reliable simulation can be obtained. Results of the demonstrated use-cases verified the feasibility and efficiency as well as the stability of implementing MR using Unity for ROS-based robots.